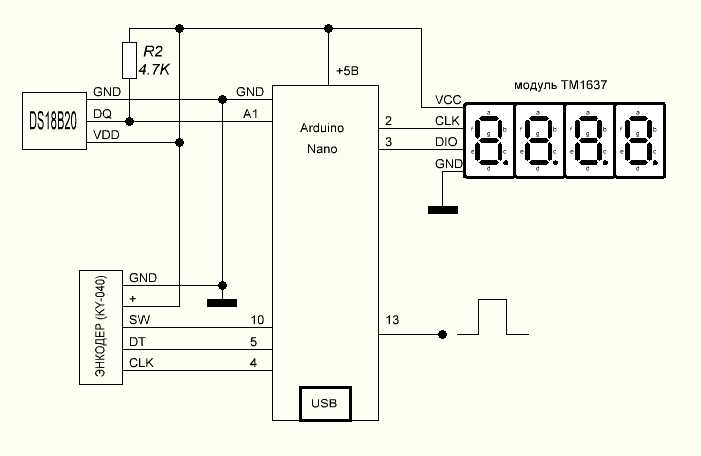
 На рисунке показана схема простого и очень удобного в использовании терморегулятора, в качестве датчика используется DS18B20, а управление регулятором осуществляется при помощи энкодера ky-040.
На рисунке показана схема простого и очень удобного в использовании терморегулятора, в качестве датчика используется DS18B20, а управление регулятором осуществляется при помощи энкодера ky-040.
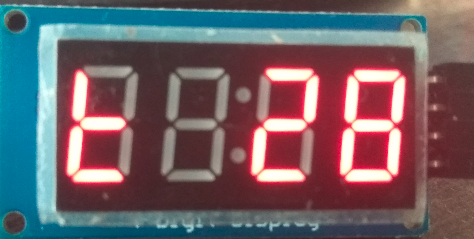
Интегральный датчик температуры DS18B20 имеет диапазон измерения температуры от -55 до + 125 °C, показания температуры выводятся на четырех разрядный семисегментный индикатор на базе драйвера TM1637 (модуль TM1637), вращая ручку энкодера можно изменять температуру регулирования, так же используется гистерезис в 0,5 °C, которой можно изменить в скетче.
 В режиме измерения температуры на индикаторе будут показания температуры, для изменения температуры регулирования достаточно начать вращать ручку энкодера, при этом будет высвечиваться показания температуры регулирования, если не вращать ручку энкодера в течении 2 секунд, снова появятся показания температуры. Для сохранения в энергонезависимую память температуры регулирования необходимо нажать кнопку энкодера, при сохранении данных на индикаторе появится надпись «S_rG».
В режиме измерения температуры на индикаторе будут показания температуры, для изменения температуры регулирования достаточно начать вращать ручку энкодера, при этом будет высвечиваться показания температуры регулирования, если не вращать ручку энкодера в течении 2 секунд, снова появятся показания температуры. Для сохранения в энергонезависимую память температуры регулирования необходимо нажать кнопку энкодера, при сохранении данных на индикаторе появится надпись «S_rG».
Если Вы используете в качестве датчика температуры модуль DS18B20, то резистор R2 из схемы необходимо исключить. Цифровой выход 13 используется для управления нагрузкой.
#include <OneWire.h> #include <TM1637Display.h> #include <EEPROM.h>//#include <EEPROMex.h> #include <DallasTemperature.h> #include <Encoder.h> #include <MsTimer2.h> TM1637Display display(2, 3);// CLK,DIO Encoder myEnc(5, 4);// CLK, DT OneWire oneWire(A1);// вход датчика 18b20 DallasTemperature t(&oneWire); int oldPosition = -999,newPosition,rom,k; unsigned long time; byte minus_reg,reg; float gis = 0.5;// гистерезис uint8_t data[]{0,0,0,0}; uint8_t data1[]{0x6d,0x08,0x50,0x3d}; void setup(){ t.begin(); t.setResolution(11);//11 бит pinMode(10,INPUT); // кнопка энкодера pinMode(13,OUTPUT); // выход для управления нагрузкой rom = EEPROM.read(0); minus_reg = EEPROM.read(1); if(minus_reg==1){rom=rom-2*rom;} display.setBrightness(0);// яркость TM1637 0-7 MsTimer2::set(3, to_Timer);MsTimer2::start(); } void loop(){ if (newPosition != oldPosition) { oldPosition = newPosition; time=millis(); reg=1; } else if(millis()-time>2000){ t.requestTemperatures(); time=millis(); reg=0; } if(digitalRead(10)==LOW){ EEPROM.update(0,abs(newPosition)); EEPROM.update(1,minus_reg); display.setSegments(data1); delay(1000); } if(newPosition<0){minus_reg=1;} else{minus_reg=0;} if(newPosition<-55){newPosition=-55;} if(newPosition>125){newPosition=125;} if(reg==1){k=newPosition;} else{k = t.getTempCByIndex(0);} if(reg==1){data[0]=0x50;} else{data[0] = 0x78;}// r / t if(k > 99){data[1] = display.encodeDigit((k/100)%10);} else{data[1] = 0x00;} if(k < 0){k=abs(k);data[1] = 0x40;} data[2] = display.encodeDigit((k/10)%10); data[3] = display.encodeDigit((k%10)%10); display.setSegments(data); if(newPosition >= t.getTempCByIndex(0) + gis){digitalWrite(13,HIGH);} if(newPosition <= t.getTempCByIndex(0) - gis){digitalWrite(13,LOW);} } void to_Timer(){newPosition = myEnc.read()/4+rom;}


Терморегулятор DS18B20 + TM1637 + кнопки — http://forum.rcl-radio.ru/viewtopic.php?pid=12011#p12011

Здравствуйте. Немного освежить тему.
Интересный проект. Завёлся без проблем. Единственный минус, который не даёт возможность его безопасного использования, это отсутствие контроля исправноси DS18B20. При обрыве связи или замыкании DS18B20 на pin13 появляется 1. Соответственно и подключается нагрузка без контроля. Если возможно поравить, было бы здорово.