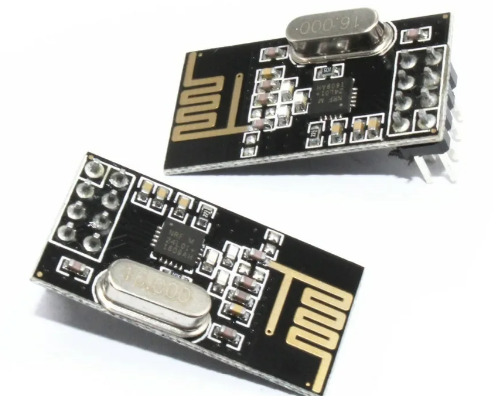
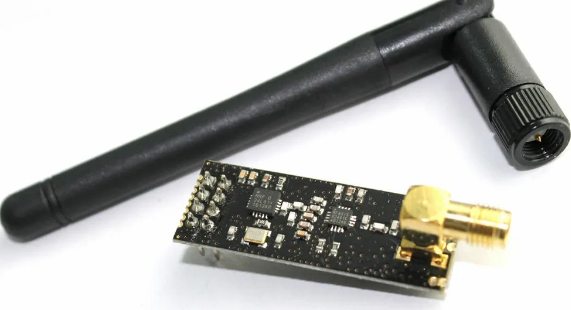
Радио модули NFR24L01 работают в диапазоне частот 2.4-2.5 ГГц, поддерживают передачу данных до 2 Мбит/с и могут работать на 125 каналах. Радио модули выпускаются малой мощности (до 100 метров или около 30 метров в помещении) и с усилителем к которому можно подключить внешнюю антенну (до 1000 м).
Один модуль способен поддерживать связь сразу с шестью приемниками или передатчиками, то есть можно объединить сразу семь устройств в общую радиосеть на частоте 2,4 ГГц. Скорость беспроводного соединения можно настраивать: 250kbps, 1Mbps или 2Mbps, а так же можно изменять мощность в пережиме передатчика от -18dBm до 0dBm.
 |
 |
 |
Основные параметры радио модуля NRF24L01
- Напряжение питания от 1.9 В до 3.6 В
- Потребляемый ток при мощности 0dBm 11.3 мА
- Потребляемый ток при передачи 2 Мбит 13.5 мА
- Частота 2,4 – 2,525 ГГц
- Скорость передачи: 250 Кбит, 1 Мбит или 2Mбит
- Программируемая выходная мощность: 0, -6, -12 и -18 dBm
Схема подключения
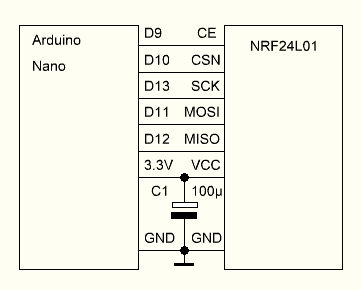
При передачи сигнала радио модуль NRF24L01 кратковременно может потреблять большой ток, поэтому рекомендуется по питанию установить электролитический конденсатор емкость от 10 до 220 мкФ.
В статье будет рассмотрено несколько простых примеров использования радио модулей, возможности радио модулей NRF24L01 достаточно большие и они могут применяться в различных системах беспроводной связи, беспроводного контроля доступа, в охранных системах, домашней автоматике и тд.
Перед загрузкой скетчей Вам понадобятся следующие библиотеки:
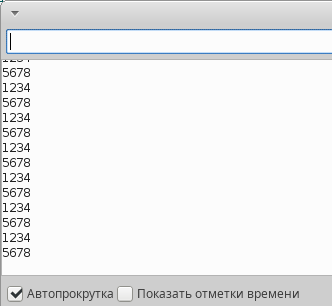
Тестовый скетч
В этом примере один радио модуль работает в качестве передатчика, а другой в качестве приемника. Передатчик передает два числа, а приемник принимает сигнал и выводит в монитор порта эти числа.
ПЕРЕДАТЧИК
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) int data[2]; void setup(){ radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate (RF24_1MBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel (RF24_PA_HIGH); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openWritingPipe (0xA0A0A0A001); } void loop(){ data[0] = 1234; data[1] = 5678; radio.write(&data, sizeof(data)); delay(1000); }
ПРИЕМНИК
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) int data[2]; void setup(){ delay(1000); Serial.begin(9600); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate (RF24_1MBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel (RF24_PA_HIGH); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openReadingPipe (1, 0xA0A0A0A001); radio.startListening (); // radio.stopListening (); } void loop(){ if(radio.available()){ radio.read(&data, sizeof(data)); Serial.println(data[0]); Serial.println(data[1]); } }
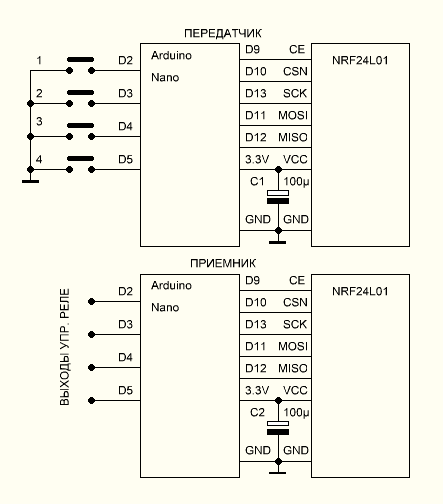
Управление 4-я реле
В этом примере можно управлять включением и выключением 4-х реле или других исполнительных уст-в. В передатчике используются 4 кнопки, при нажатии на кнопку в приемнике меняет логическое состояние один их выходов к которому можно подключить модуль реле.
ПЕРЕДАТЧИК
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) int data_reg; bool w1,w2,w3,w4; void setup(){ delay(1000); Serial.begin(9600); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate(RF24_250KBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel(RF24_PA_MIN); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openWritingPipe(0xA1A1A1A102); pinMode(2,INPUT_PULLUP); pinMode(3,INPUT_PULLUP); pinMode(4,INPUT_PULLUP); pinMode(5,INPUT_PULLUP); } void loop(){ if(digitalRead(2)==LOW && w1==0){w1=1;data_reg |= (1<<0);delay(200);} if(digitalRead(2)==LOW && w1==1){w1=0;data_reg &=~(1<<0);delay(200);} if(digitalRead(3)==LOW && w2==0){w2=1;data_reg |= (1<<1);delay(200);} if(digitalRead(3)==LOW && w2==1){w2=0;data_reg &=~(1<<1);delay(200);} if(digitalRead(4)==LOW && w3==0){w3=1;data_reg |= (1<<2);delay(200);} if(digitalRead(4)==LOW && w3==1){w3=0;data_reg &=~(1<<2);delay(200);} if(digitalRead(5)==LOW && w4==0){w4=1;data_reg |= (1<<3);delay(200);} if(digitalRead(5)==LOW && w4==1){w4=0;data_reg &=~(1<<3);delay(200);} radio.write(&data_reg, sizeof(data_reg)); Serial.println(data_reg); delay(100); }
ПРИЕМНИК
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) int data_old,data; unsigned long times; void setup(){ delay(1000); Serial.begin(9600); pinMode(2,OUTPUT);pinMode(3,OUTPUT);pinMode(4,OUTPUT);pinMode(5,OUTPUT); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate(RF24_250KBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel(RF24_PA_MIN); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openReadingPipe(1, 0xA1A1A1A102); radio.startListening(); } void loop(){ if(radio.available()){ radio.read(&data, sizeof(data)); Serial.println(data); if(((data >> 0) & 1) ==1){digitalWrite(2,HIGH);}else{digitalWrite(2,LOW);} if(((data >> 1) & 1) ==1){digitalWrite(3,HIGH);}else{digitalWrite(3,LOW);} if(((data >> 2) & 1) ==1){digitalWrite(4,HIGH);}else{digitalWrite(4,LOW);} if(((data >> 3) & 1) ==1){digitalWrite(5,HIGH);}else{digitalWrite(5,LOW);} } }
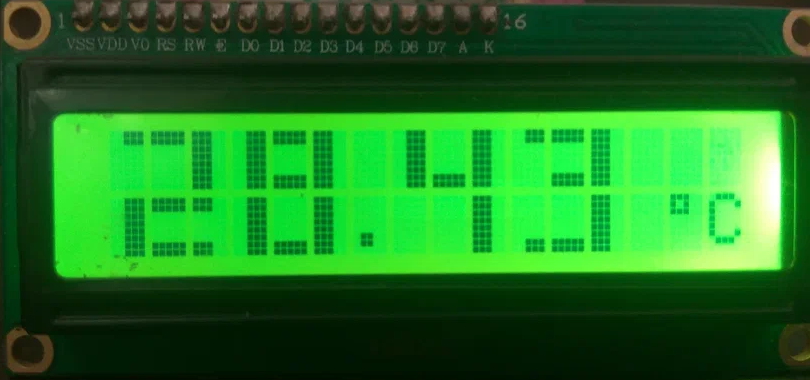
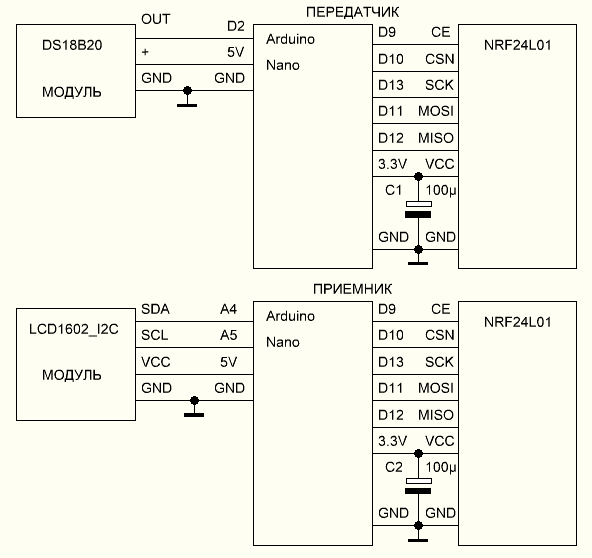
Электронный термометр DS18B20
В следующем примере к передатчику подключен цифровой датчик температуры DS18B20, передатчик передает температуру, а приемник выводит ее на дисплей LCD1602_I2C. В момент получения информации на экран выводится символ «*».

ПЕРЕДАТЧИК
#include <SPI.h> #include <nRF24L01.h> #include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) OneWire ds(2); // Вход датчика 18b20 int data_t; void setup(){ radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate (RF24_1MBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel (RF24_PA_HIGH); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openWritingPipe (0xA0A0A0A001); } void loop(){ data_t = dsRead(0)*100; radio.write(&data_t, sizeof(data_t)); delay(1000); } float dsRead(byte x) { byte data[2], addr[8][8], kol = 0; while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков kol++; } ds.reset_search(); // Сброс поиска датчика ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0x44, 0); // Измерение температуры с переносом данных в память ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0xBE); // Обращение памяти data[0] = ds.read();// Чтение памяти byte low data[1] = ds.read();// Чтение памяти byte high float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод }
ПРИЕМНИК
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> #include <LiquidCrystal_I2C.h> // http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 #include <Wire.h> RF24 radio(9, 10); // (CE, CSN) LiquidCrystal_I2C lcd(0x27,16,2); int data; byte v1[8] = {0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x07}; byte v2[8] = {0x07,0x07,0x00,0x00,0x00,0x00,0x00,0x00}; byte v3[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v4[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v5[8] = {0x1C,0x1C,0x00,0x00,0x00,0x00,0x1C,0x1C}; byte v6[8] = {0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C}; byte v7[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x07,0x07}; byte v8[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x00,0x00}; byte d1,d2,d3,d4,d5,d6,e1,e2,e3,a[6],x; void setup(){ delay(1000); Serial.begin(9600); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate (RF24_1MBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel (RF24_PA_HIGH); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openReadingPipe (1, 0xA0A0A0A001); radio.startListening (); // radio.stopListening (); Wire.begin();lcd.init();lcd.backlight(); lcd.createChar(1, v1);lcd.createChar(2, v2);lcd.createChar(3, v3);lcd.createChar(4, v4); lcd.createChar(5, v5);lcd.createChar(6, v6);lcd.createChar(7, v7);lcd.createChar(8, v8); } void loop(){ if(radio.available()){ radio.read(&data, sizeof(data)); Serial.println((float)data/100); a[0]=data/1000; a[1]=data/100%10; a[2]=data/10%10; a[3]=data%10; if(data<1000){a[0]=10;} if(data<100){a[1]=10;} for(x=0;x<4;x++){ switch(x){ case 0: e1=0;e2=1,e3=2;break; case 1: e1=3,e2=4,e3=5;break; case 2: e1=7,e2=8,e3=9;break; case 3: e1=10,e2=11,e3=12;break; }digit();} lcd.setCursor(6,1);lcd.print("."); lcd.setCursor(14,1);lcd.write((uint8_t)223);;lcd.print("C"); lcd.setCursor(15,0);lcd.print("*"); delay(200); } else{lcd.setCursor(15,0);lcd.print(" ");} } void digit(){ switch(a[x]){ case 0: d1=1,d2=8,d3=6,d4=1,d5=3,d6=6;break; case 1: d1=32,d2=2,d3=6,d4=32,d5=32,d6=6;break; case 2: d1=2,d2=8,d3=6,d4=1,d5=4,d6=5;break; case 3: d1=2,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 4: d1=1,d2=3,d3=6,d4=32,d5=32,d6=6;break; case 5: d1=1,d2=4,d3=5,d4=7,d5=3,d6=6;break; case 6: d1=1,d2=4,d3=5,d4=1,d5=3,d6=6;break; case 7: d1=1,d2=8,d3=6,d4=32,d5=32,d6=6;break; case 8: d1=1,d2=4,d3=6,d4=1,d5=3,d6=6;break; case 9: d1=1,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 10:d1=150,d2=150,d3=150,d4=150,d5=150,d6=150;break; } lcd.setCursor(e1,0);lcd.write((uint8_t)d1); lcd.setCursor(e2,0);lcd.write((uint8_t)d2);lcd.setCursor(e3,0);lcd.write((uint8_t)d3);lcd.setCursor(e1,1); lcd.write((uint8_t)d4);lcd.setCursor(e2,1);lcd.write((uint8_t)d5);lcd.setCursor(e3,1);lcd.write((uint8_t)d6);}
Терморегулятор
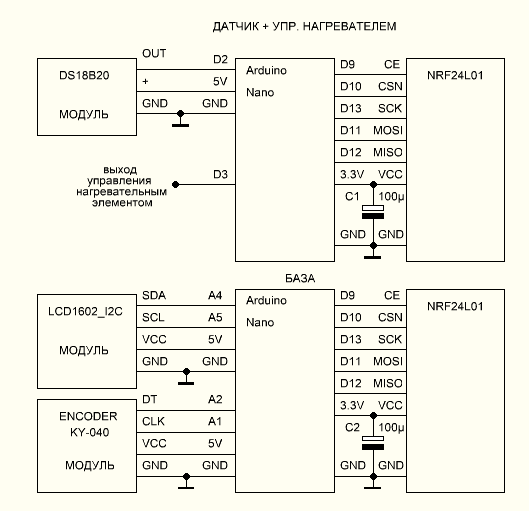
Во всех выше показанных примерах радио модули разделены на приемники и передатчики, в это примере каждый радио модуль работает как приемопередатчик.
Базовый модуль терморегулятора содержит дисплей LCD1602 с модулем I2C и энкодер для установки температуры регулирования. Модуль датчика и управления нагревательным элементом измеряет температуру и каждые 2 секунды передает ее значение в базовый модуль, базовый модуль получает значение температуры и выводит ее на дисплей, при помощи энкодера в базовом модуле можно изменить температуру регулирования, температура регулирования каждые 2 секунды передается в модуль датчика. Оба модуля основное время работают как приемники и раз в 2 секунды переходят в режим передатчика передавая необходимую информацию. Модуль датчика в зависимости от текущей температуры и температуры регулирования управляет цифровым выходом D3 к который может управлять нагревательным элементом.
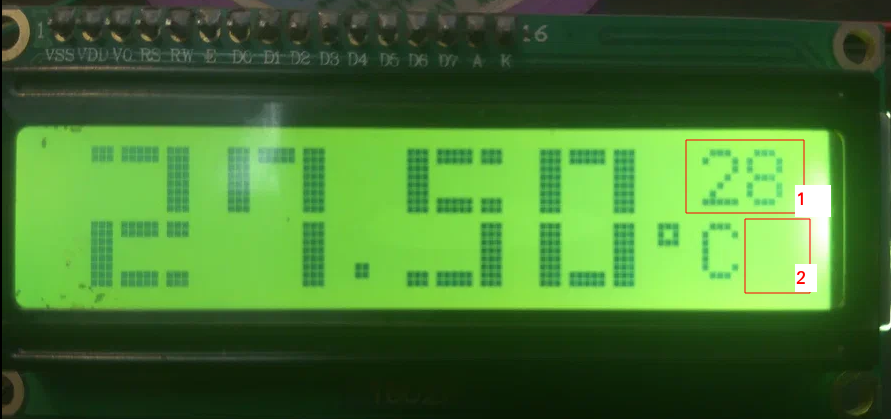
- Температура регулирования
- Индикатор получения информации (в момент приема выводится символ *)
БАЗА
#include <SPI.h> #include <nRF24L01.h> #include <RF24.h> #include <LiquidCrystal_I2C.h> // http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 #include <Wire.h> #include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip #include <EEPROM.h> #include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip RF24 radio(9, 10); // (CE, CSN) LiquidCrystal_I2C lcd(0x27,16,2); Encoder myEnc(A2, A1);// DT, CLK int data,data_reg; unsigned long times,times_eeprom,oldPosition = -999,newPosition; bool w; byte v1[8] = {0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x07}; byte v2[8] = {0x07,0x07,0x00,0x00,0x00,0x00,0x00,0x00}; byte v3[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v4[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v5[8] = {0x1C,0x1C,0x00,0x00,0x00,0x00,0x1C,0x1C}; byte v6[8] = {0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C}; byte v7[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x07,0x07}; byte v8[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x00,0x00}; byte d1,d2,d3,d4,d5,d6,e1,e2,e3,a[6],x; void setup(){ delay(1000); Serial.begin(9600); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate(RF24_250KBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel(RF24_PA_MIN); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openReadingPipe(1, 0xA0A0A0A001); radio.openWritingPipe(0xA1A1A1A102); radio.startListening (); Wire.begin();lcd.init();lcd.backlight(); lcd.createChar(1, v1);lcd.createChar(2, v2);lcd.createChar(3, v3);lcd.createChar(4, v4); lcd.createChar(5, v5);lcd.createChar(6, v6);lcd.createChar(7, v7);lcd.createChar(8, v8); MsTimer2::set(3, to_Timer);MsTimer2::start(); if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении data_reg = EEPROM.read(0); } void loop(){ if(radio.available() && w==0){ radio.read(&data, sizeof(data)); Serial.println((float)data/100); a[0]=data/1000; a[1]=data/100%10; a[2]=data/10%10; a[3]=data%10; if(data<1000){a[0]=10;} if(data<100){a[1]=10;} for(x=0;x<4;x++){ switch(x){ case 0: e1=0;e2=1,e3=2;break; case 1: e1=3,e2=4,e3=5;break; case 2: e1=7,e2=8,e3=9;break; case 3: e1=10,e2=11,e3=12;break; }digit();} lcd.setCursor(6,1);lcd.print("."); lcd.setCursor(13,1);lcd.write((uint8_t)223);;lcd.print("C"); lcd.setCursor(15,1);lcd.print("*"); delay(200); } else{lcd.setCursor(15,1);lcd.print(" "); } if (newPosition != oldPosition){oldPosition = newPosition;data_reg=data_reg+newPosition;myEnc.write(0);newPosition=0;times_eeprom=millis();w=1; if(data_reg>9){lcd.setCursor(14,0);}else{lcd.setCursor(15,0);}lcd.print(data_reg);} if(millis()-times>2000 && w==0){times=millis(); radio.stopListening(); radio.write(&data_reg, sizeof(data_reg)); radio.startListening(); } if(millis()-times_eeprom>5000 && w==1){EEPROM.update(0,data_reg);w=0;} } void to_Timer(){newPosition = myEnc.read()/4;} void digit(){ switch(a[x]){ case 0: d1=1,d2=8,d3=6,d4=1,d5=3,d6=6;break; case 1: d1=32,d2=2,d3=6,d4=32,d5=32,d6=6;break; case 2: d1=2,d2=8,d3=6,d4=1,d5=4,d6=5;break; case 3: d1=2,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 4: d1=1,d2=3,d3=6,d4=32,d5=32,d6=6;break; case 5: d1=1,d2=4,d3=5,d4=7,d5=3,d6=6;break; case 6: d1=1,d2=4,d3=5,d4=1,d5=3,d6=6;break; case 7: d1=1,d2=8,d3=6,d4=32,d5=32,d6=6;break; case 8: d1=1,d2=4,d3=6,d4=1,d5=3,d6=6;break; case 9: d1=1,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 10:d1=150,d2=150,d3=150,d4=150,d5=150,d6=150;break; } lcd.setCursor(e1,0);lcd.write((uint8_t)d1); lcd.setCursor(e2,0);lcd.write((uint8_t)d2);lcd.setCursor(e3,0);lcd.write((uint8_t)d3);lcd.setCursor(e1,1); lcd.write((uint8_t)d4);lcd.setCursor(e2,1);lcd.write((uint8_t)d5);lcd.setCursor(e3,1);lcd.write((uint8_t)d6);}
ДАТЧИК
#include <SPI.h> #include <nRF24L01.h> #include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip #include <RF24.h> RF24 radio(9, 10); // (CE, CSN) OneWire ds(2); // Вход датчика 18b20 int data_t,data; unsigned long times; int gis = 50;// 0.5 гр.Цельсия void setup(){ delay(1000); Serial.begin(9600); pinMode(3,OUTPUT); radio.begin(); radio.setChannel(5); // канал от 0 до 125 radio.setDataRate(RF24_250KBPS); // RF24_250KBPS, RF24_1MBPS, RF24_2MBPS radio.setPALevel(RF24_PA_MIN); // RF24_PA_MIN=-18dBm, RF24_PA_LOW=-12dBm, RF24_PA_HIGH=-6dBm, RF24_PA_MAX=0dBm radio.openReadingPipe(1, 0xA1A1A1A102); radio.openWritingPipe(0xA0A0A0A001); radio.startListening(); } void loop(){ if(radio.available()){ radio.read(&data, sizeof(data)); Serial.println(data); } if(millis()-times>2000){times=millis(); data_t = dsRead(0)*100; radio.stopListening(); radio.write(&data_t, sizeof(data_t)); radio.startListening(); } if(data*100 >= data_t + gis){digitalWrite(3,HIGH);} if(data*100 <= data_t - gis){digitalWrite(3,LOW);} } float dsRead(byte x) { byte data[2], addr[8][8], kol = 0; while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков kol++; } ds.reset_search(); // Сброс поиска датчика ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0x44, 0); // Измерение температуры с переносом данных в память ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0xBE); // Обращение памяти data[0] = ds.read();// Чтение памяти byte low data[1] = ds.read();// Чтение памяти byte high float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод }
Форум — http://forum.rcl-radio.ru/viewtopic.php?id=500
*При тестировании когда радио модули находятся близко к друг другу не рекомендуется устанавливать максимальную мощность передатчика:
radio.setPALevel(RF24_PA_MIN); // RF24_PA_MIN=-18dBm

 4,50 (8)
4,50 (8)