Ранее в http://rcl-radio.ru/?p=86998 рассматривался пример создания внешнего ЦАПа на базе ресивера CS8416 и ЦАП AD1852, в этой статье аналогичный доработанный проект внешнего ЦАПа.
Микросхема AD1852 является однокристальной законченной 18/20/24-разрядной звуковоспроизводящей стерео системой. Она состоит из мультибитного сигма-дельта преобразователя, цифрового интерполяционного фильтра и аналоговой дифференциальной выходной схемы. Кроме этого система включает в себя стерео аттенюатор и устройство отключения звука, которые программируются через последовательный порт SPI. Микросхема AD1852 полностью совместима со всеми известными форматами DVD с частотами дискретизации 192 кГц и 96 кГц, а также с 24-разрядными данными. Для совместимости с устаревшими форматами система также поддерживает цифровую частотную коррекцию 50/15 мкс, использовавшуюся в компакт-дисках «redbook», и компенсацию предыскажений для частот дискретизации 32 кГц и 48 кГц.

Входной цифровой сигнал для внешнего ЦАПа имеет формат S/PDIF (цифровой аудио интерфейс разработанный фирмами SONY/PHILIPS, предназначен для передачи цифрового сигнала между аудио устройствами), ресивер на CS8416 преобразует его в формат I2S 24 бит с частотой дискретизации 192 кГц. Цифровой сигнала I2S поступает на ЦАП AD1852, далее с выхода AD1852 звуковой сигнал поступает на фильтр-сумматор собранный на ОУ NE5532.
Для нормальной работы ресивер и ЦАП должный иметь одинаковый формат передачи цифровых данных, в данном случае это I2S 24 бит с частотой дискретизации 192 кГц.
Основные характеристики AD1852:
- Напряжение питания (AVDD, DVDD) … +5 В
- Поддержка 24 бит с частотой дискретизации до 192 кГц
- Отношение сигнал / шум (от 20 Гц до 20 кГц) … 114 дБ
- Динамический диапазон (от 20 Гц до 20 кГц, вход -60 дБ) … 114 дБ
- Общие гармонические искажения + шум (стерео) … −102 dB 0.00079 %
- Управление SPI
- Фильтр De-emphasis:
- No De-emphasis
- 32 kHz
- 48 kHz
- 44.1 kHz
- Выходной формат данных:
- Left-Justified
- Right-Justified
- I2S
- Разрядность
- 16 bit
- 20 bit
- 24 bit
Параметры ресивера CS8416:
- Напряжение питания:
- +3.3 V Analog Supply (VA)
- +3.3 V Digital Supply (VD)
- +3.3 V or +5.0 V Digital Interface Supply (VL)
- Входной формат данных: S/PDIF
- Выходной формат данных:
- Left-Justified
- Right-Justified
- I2S
- Разрядность 24 бит
- Частота дискредитации 192 кГц
- Фильтр De-emphasis:
- No De-emphasis
- 32 kHz
- 48 kHz
- 44.1 kHz
- Кол-во входов: 8
- Управление: I2C
Внешний ЦАП состоит из нескольких компонентов:
- Ресивер на CS8416
- ЦАП на AD1852
- ФНЧ на NE5532
- Источник питания
- Плата Arduino Nano
- Индикатор LCD1602 с модулем I2C
- Энкодер KY-040
- Кнопки — MUTE, INPUT
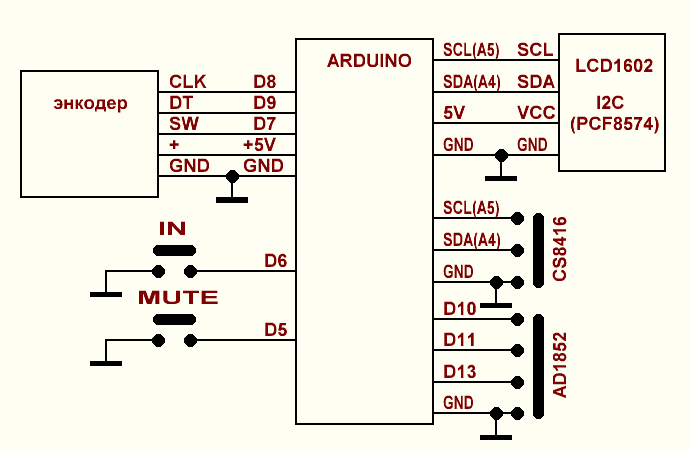
Ресивер программно сконфигурирован на работу с 4-я входами (можно увеличить до 8), управление внешним ЦАПом осуществляется при помощи энкодера, кнопка энкодера позволяет переключится между меню «VOLUME» и «De-emphasis SEL», поворот ручки энкодера меняет настройки выбранного параметра. Дополнительно используются кнопки MUTE и IN. Вся информация выводится на индикатор LCD1602 ( с модулем I2C). Громкость имеет 28 шагов.
Схема ресивера на CS8416
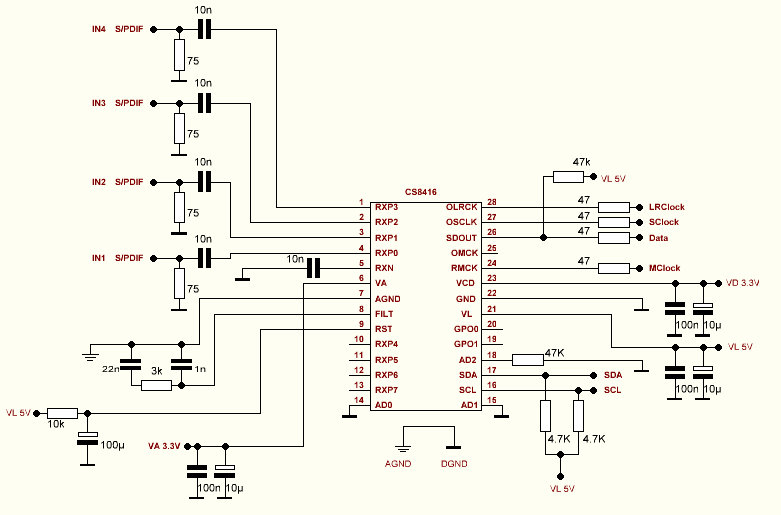
Схема ЦАП на AD1852
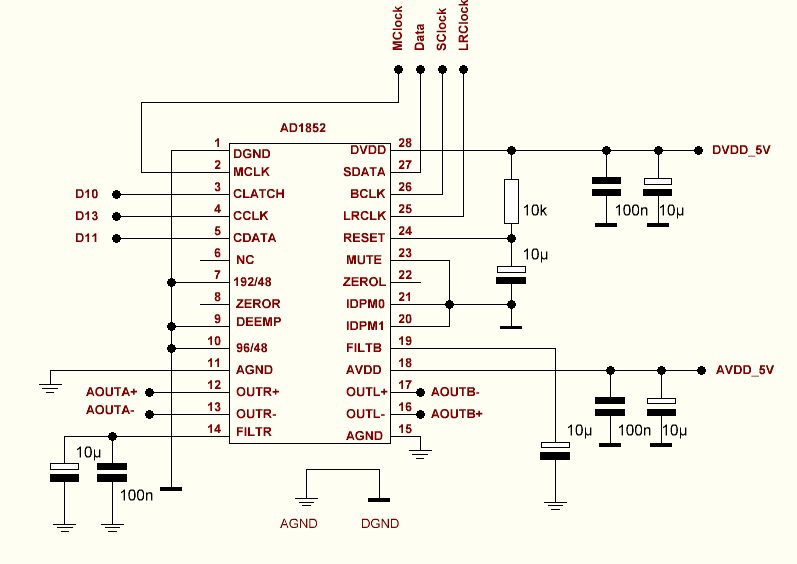
Схема ФНЧ на NE5532
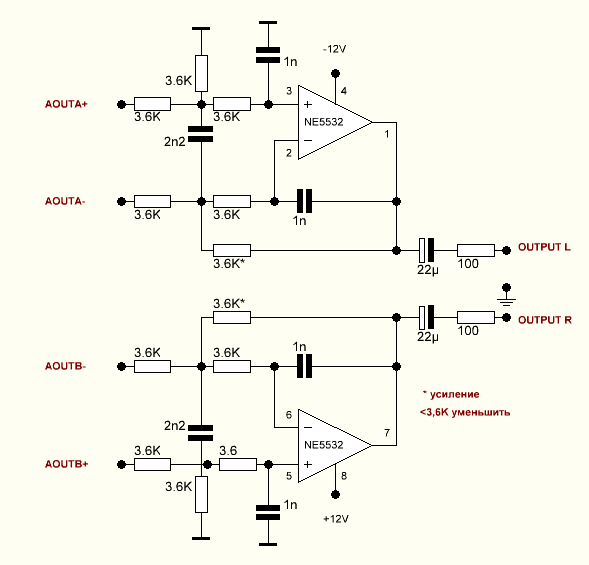
Схема управления
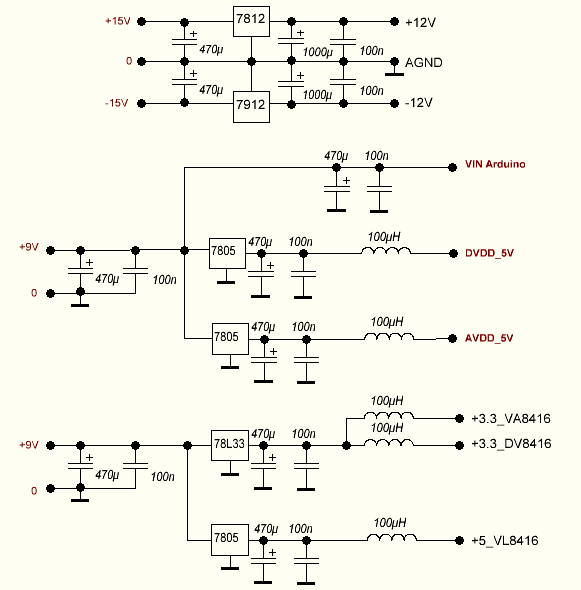
Для питания внешнего ЦАПа рекомендуется использовать три независимых источника питания, который состоит из одного трансформатора с тремя независимыми вторичными обмотками, одна из которых имеет отвод от середины для двух полярного источника питания. Каждый источник питания имеет свой диодный мост. При этом аналоговая и цифровая земля объединяются через дроссель. Дополнительно как можно ближе к микросхемам по цепи питания устанавливаются фильтрующие конденсаторы 0,1 и 10 мкФ.
Схема источника питания (стабилизаторы)
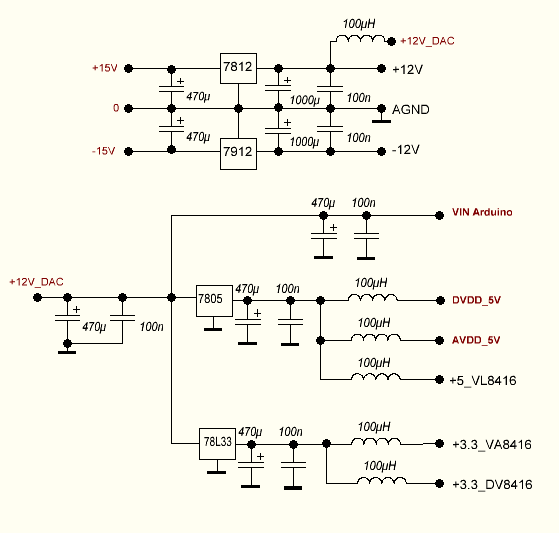
Упрощенная схема источника питания (стабилизаторы)
 |
 |
#define CS 10 // CLATCH #define MOSI 11 // CDATA #define SCK 13 // CCLK #include <SPI.h> #include <EEPROM.h> #include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip #include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip #include <LiquidCrystal_I2C.h> //Библиотека - http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 Encoder myEnc(8, 9);//CLK, DT LiquidCrystal_I2C lcd(0x27,16,2); // Устанавливаем дисплей byte v1[8] = {0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x07}; byte v2[8] = {0x07,0x07,0x00,0x00,0x00,0x00,0x00,0x00}; byte v3[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v4[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x1F,0x1F}; byte v5[8] = {0x1C,0x1C,0x00,0x00,0x00,0x00,0x1C,0x1C}; byte v6[8] = {0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C,0x1C}; byte v7[8] = {0x00,0x00,0x00,0x00,0x00,0x00,0x07,0x07}; byte v8[8] = {0x1F,0x1F,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned long times,oldPosition = -999,newPosition,times1; int w,vol,mute,code_mute,in,w2,a[3],menu,dem,err,err_old; int db[28]={1,2,3,4,5,6,8,10,12,14,16,19,23,26,29,33,38,43,49,56,63,70,79,86,95,104,116,127}; byte i,d1,d2,d3,d4,d5,d6,e1,e2,e3; void setup(){ Wire.begin();Serial.begin(9600);SPI.begin();Wire.setClock(31000L); lcd.init();lcd.backlight(); lcd.createChar(1, v1);lcd.createChar(2, v2);lcd.createChar(3, v3);lcd.createChar(4, v4);lcd.createChar(5, v5);lcd.createChar(6, v6);lcd.createChar(7, v7);lcd.createChar(8, v8); MsTimer2::set(1, to_Timer);MsTimer2::start(); if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении lcd.setCursor(5,0);lcd.print("CS8416"); lcd.setCursor(5,1);lcd.print("AD1852"); pinMode(CS,OUTPUT); pinMode(7,INPUT); // кнопка SW энкодера MENU pinMode(6,INPUT_PULLUP); // кнопка IN pinMode(5,INPUT_PULLUP); // кнопка MUTE vol = EEPROM.read(0);in = EEPROM.read(1);dem = EEPROM.read(2); // Write 8416 Wire.beginTransmission(0x10); Wire.write (0x00); Wire.write (0b00000000); Wire.write (0b10000010);// 128Fs Wire.write (0b00000000 + (dem << 4)); Wire.write (0b00000000); Wire.write (0b10000000 + (in << 3)); Wire.write (0b10000101); Wire.write (0xFF); Wire.write (0x00); Wire.write (0x00); Wire.write (0x00); Wire.endTransmission(); delay(100); WriteAD1852(0b100010010001 + (dem << 2) ); // register control WriteAD1852(0b00+(vol<<9)); // register volume left WriteAD1852(0b10+(vol<<9)); // register volume right delay(500);lcd.clear(); }// setup void loop(){ /// MENU ////////////////////////////// if(digitalRead(7)==LOW){menu++;if(menu>1){menu=0;};delay(200);lcd.clear();w=1;times=millis();w2=1;} /// INPUT ///////////////////////////// if(digitalRead(6)==LOW){in++;if(in>3){in=0;}delay(200);w=1;times=millis();w2=1; // Write 8416 Wire.beginTransmission(0x10); Wire.write (0x00); Wire.write (0b00000000); Wire.write (0b10000010);// 128Fs Wire.write (0b00000000 + (dem << 4)); Wire.write (0b00000000); Wire.write (0b10000000 + (in << 3)); Wire.write (0b10000101); Wire.write (0xFF); Wire.write (0x00); Wire.write (0x00); Wire.write (0x00); Wire.endTransmission(); delay(10); } /// MUTE /////////////////// if(digitalRead(5)==LOW&&mute==0){mute=1;code_mute = 0b1000000;delay(200);WriteAD1852(0b100010010001 + (dem << 2) + code_mute );} if(digitalRead(5)==LOW&&mute==1){mute=0;code_mute = 0;delay(200);WriteAD1852(0b100010010001 + (dem << 2) + code_mute );} /// VOLUME /////////////////////////////////////////////////// if(menu==0){ if (newPosition != oldPosition){oldPosition = newPosition; vol=vol+newPosition;myEnc.write(0);newPosition=0;w=1;times=millis();w2=1; if(vol>27){vol=27;}if(vol<0){vol=0;} WriteAD1852(0b100010010001 + (dem << 2) + code_mute ); // register control WriteAD1852(0b00+(db[vol]<<9)); // register volume left WriteAD1852(0b10+(db[vol]<<9)); // register volume right } lcd.setCursor(0,0); if(mute==1){lcd.setCursor(0,0);lcd.print("MUTE ");} if(err==0&&mute==0){lcd.setCursor(0,0);lcd.print("VOLUME ");} if(err>0&&mute==0){ lcd.setCursor(0,0);lcd.print("ERROR ");} lcd.setCursor(0,1);lcd.print("COAX ");lcd.print(in+1); if(w2==1){w2=0; a[0]=vol/10;a[1]=vol%10; for(i=0;i<2;i++){ switch(i){ case 0: e1=9,e2=10,e3=11;break; case 1: e1=12,e2=13,e3=14;break; } switch(a[i]){ case 0: d1=1,d2=8,d3=6,d4=1,d5=3,d6=6;break; case 1: d1=32,d2=2,d3=6,d4=32,d5=32,d6=6;break; case 2: d1=2,d2=8,d3=6,d4=1,d5=4,d6=5;break; case 3: d1=2,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 4: d1=1,d2=3,d3=6,d4=32,d5=32,d6=6;break; case 5: d1=1,d2=4,d3=5,d4=7,d5=3,d6=6;break; case 6: d1=1,d2=4,d3=5,d4=1,d5=3,d6=6;break; case 7: d1=1,d2=8,d3=6,d4=32,d5=32,d6=6;break; case 8: d1=1,d2=4,d3=6,d4=1,d5=3,d6=6;break; case 9: d1=1,d2=4,d3=6,d4=7,d5=3,d6=6;break; } lcd.setCursor(e1,0);lcd.write((uint8_t)d1);lcd.setCursor(e2,0);lcd.write((uint8_t)d2);lcd.setCursor(e3,0);lcd.write((uint8_t)d3); lcd.setCursor(e1,1);lcd.write((uint8_t)d4);lcd.setCursor(e2,1);lcd.write((uint8_t)d5);lcd.setCursor(e3,1);lcd.write((uint8_t)d6); }} } /// DE-EMPHASIS ////////////////////////////////// if(menu==1){ if (newPosition != oldPosition){oldPosition = newPosition; dem=dem+newPosition;myEnc.write(0);newPosition=0;w=1;times=millis();w2=1; if(dem<0){dem=3;}if(dem>3){dem=0;} WriteAD1852(0b100010010001 + (dem << 2) + code_mute ); // register control WriteAD1852(0b00+(db[vol]<<9)); // register volume left WriteAD1852(0b10+(db[vol]<<9)); // register volume right switch(dem){ case 0: dem = 0;break; case 1: dem = 2;break; case 2: dem = 1;break; case 3: dem = 3;break; } // Write 8416 Wire.beginTransmission(0x10); Wire.write (0x00); Wire.write (0b00000000); Wire.write (0b10000010);// 128Fs Wire.write (0b00000000 + (dem << 4)); Wire.write (0b00000000); Wire.write (0b10000000 + (in << 3)); Wire.write (0b10000101); Wire.write (0xFF); Wire.write (0x00); Wire.write (0x00); Wire.write (0x00); Wire.endTransmission(); delay(10); } if(w2==1){w2=0; lcd.setCursor(0,0);lcd.print("DE-EMPHASIS SEL"); lcd.setCursor(0,1); switch(dem){ case 0: lcd.print("No De-emphasis");break; case 1: lcd.print("44.1 kHz ");break; case 2: lcd.print("32.0 kHz ");break; case 3: lcd.print("48.0 kHz ");break; }}} ////////// cs8416 read if(millis()-times1>1000){times1=millis();err = wireRead(0x10,0x0C);delay(10);} if(err!=err_old){err_old = err;w2=1;} if(millis()-times>5000 && w==1){w=0;EEPROM.update(0,vol);EEPROM.update(1,in);EEPROM.update(2,dem);menu=0;lcd.clear();w2=1;} }// loop void WriteAD1852(uint16_t Data){ for(int p=0;p<2;p++){ SPI.beginTransaction(SPISettings(SPI_CLOCK_DIV16, MSBFIRST, SPI_MODE3)); digitalWrite(CS, HIGH); delayMicroseconds(10); SPI.transfer16(Data); digitalWrite(CS, LOW); SPI.endTransaction(); }} byte wireRead(int addr, int reg){ Wire.beginTransmission(addr); Wire.write (reg); Wire.endTransmission(); delay(10); Wire.requestFrom(addr,1); while(Wire.available()<1); byte value = Wire.read(); return value; } void to_Timer(){newPosition = myEnc.read()/4;}
