Тахометр на Arduino предназначен для измерения частоты вращения различных вращающихся деталей, таких как роторы, валы, диски и др. Принцип измерения основан на стробоскопическом эффекте, на деталь наносят яркую белую метку, которая при вращении детали зрительно будет перемещаться или останавливаться когда частота вращения детали и частота пульсации светодиода тахометра будут одинаковые.
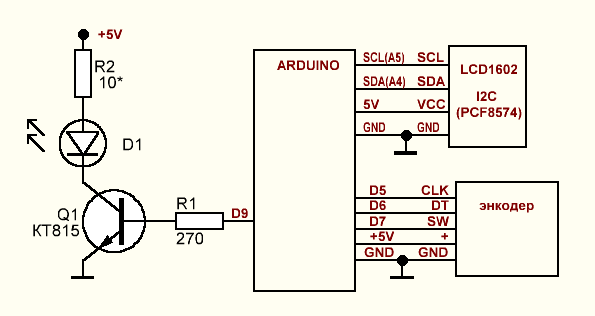
Схема тахометра достаточно простая, для сборки Вам понадобится 2 резистора 0,125 Вт, транзистор КТ815, яркий светодиод, индикатор LCD1602 с модулем I2C, энкодер KY-040 и плата Arduino Nano.
Светодиод в моем случае использован от подсветки LED телевизора, с номинальным рабочим напряжением 3 В, мощностью 1 Вт, но Вы можете использовать любой другой светодиод белого свечения, мощностью не менее 1 Вт.
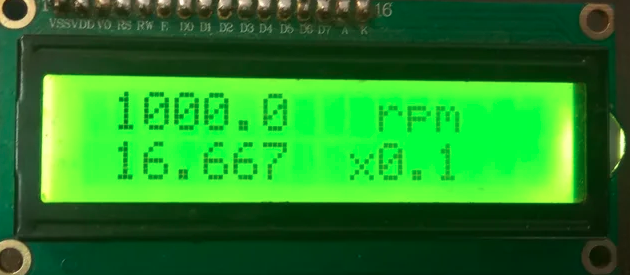
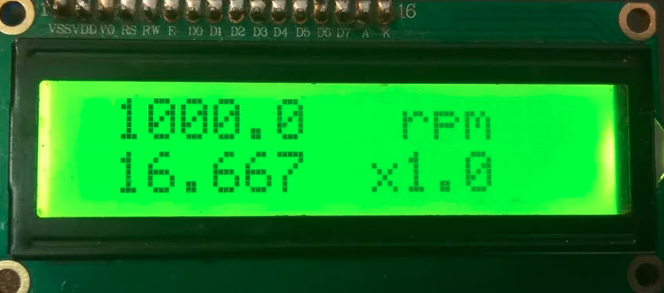
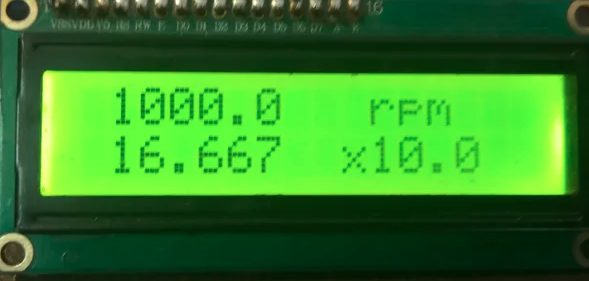
Диапазон измерения тахометра от 10 об/мин до 25000 об/мин, с шагом 0,1 об/мин. Частота пульсаций светодиода меняется при помощи энкодера, нажатие кнопки энкодера позволяет менять множитель изменения частоты (x0.1, x1.0, x10.0, x100.0).
 |
 |
 |
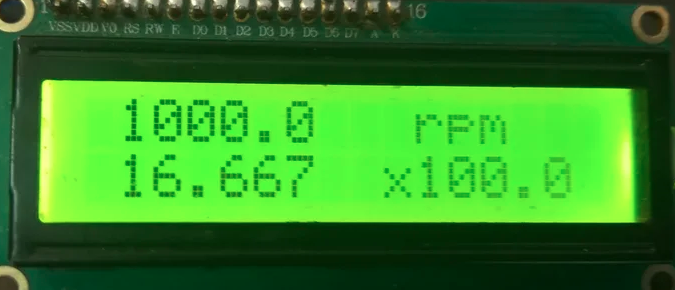 |
В верхней строке индикатора показана текущая частота в об/мин (при включении установлено 1000 об/мин), во второй сроке показан множитель и частота пульсаций светодиода (F = об/мин * 60).
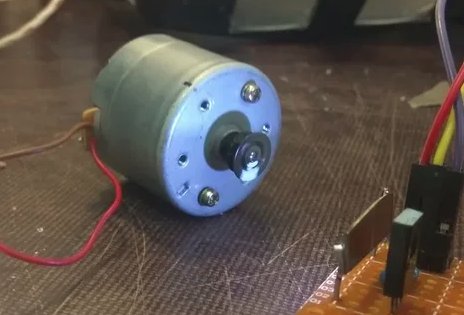
Для тестирования я использовал маломощный электродвигатель, на его вал при помощи корректирующей жидкости «Штрих» была нанесена метка, после запуска электродвигателя энкодером я подобрал частоту пульсации светодиода при которой метка зрительно остановила свое вращение, частота пульсаций светодиода стала равна частоте оборотов электродвигателя.
Вид метки при синхронизации вала электродвигателя с частотой пульсаций светодиода.
Видео
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip #include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip #include <LiquidCrystal_I2C.h> //Библиотека - http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 Encoder myEnc(5, 6);//CLK, DT LiquidCrystal_I2C lcd(0x27,16,2); // Устанавливаем дисплей float f; long en=10000; unsigned long oldPosition = -999,newPosition; bool w; byte hag; int mn; void setup(){ Serial.begin(9600); MsTimer2::set(3, to_Timer);MsTimer2::start(); Wire.begin();lcd.init();lcd.backlight(); DDRB |= (1 << 1); // ВЫХОД ГЕНЕРАТОРА D9 pinMode(7,INPUT); // КНОПКА ЭНКОДЕРА D7 setupFreq(f/60); } void loop(){ if(digitalRead(7)==LOW){hag++;if(hag>3){hag=0;}delay(100);} switch(hag){ case 0: mn=1;break; case 1: mn=10;break; case 2: mn=100;break; case 3: mn=1000;break; } if (newPosition != oldPosition){oldPosition = newPosition; en=en+newPosition*mn;myEnc.write(0);newPosition=0;if(en<100){en=100;}if(en>250000){en=250000;}w=1;f=(float)en;setupFreq(f/600);} Serial.println(f,2); lcd.setCursor(1,0);lcd.print(f/10,1);lcd.print(" ");lcd.setCursor(10,0);lcd.print("rpm"); lcd.setCursor(9,1);lcd.print("x");lcd.print((float)mn/10,1);lcd.print(" ");lcd.setCursor(1,1);lcd.print(f/600,3);lcd.print(" "); delay(100); } void setupFreq(float freq){ int prescallers[] = {0, 1, 8, 64, 256, 1024}; unsigned long ocr; byte prescallerBits = 1; int prescaller = prescallers[prescallerBits]; if (freq) { do { ocr = 8000000 / freq / prescaller - 1; if (ocr < 65535){break;} prescallerBits += 1; prescaller = prescallers[prescallerBits]; } while (prescallerBits < 6); if (ocr < 65535) { cli(); TCCR1A = 0; TCCR1B = 0; TCCR1B = prescallerBits; OCR1A = ocr; TCCR1B |= (1 << WGM12); TIMSK1 |= (1 << OCIE1A); sei(); float freq = 8000000.00 / prescaller / (ocr + 1); } } } ISR(TIMER1_COMPA_vect){PORTB |= (1 << 1);delay(1);PORTB &= ~(1 << 1);} void to_Timer(){newPosition = myEnc.read()/4;}
При провидении измерений стробоскопическим методом есть одна особенность, если Вы не знаете примерную частоту вращения вала двигателя, то при измерении метка зрительно может остановится на меньшей кратной частоте. Например если частота вращения двигателя 1200 об/мин, то метка зрительно будет останавливаться при частоте пульсаций светодиода на 600 об/мин (кратно 2), 400 об/мин (кратно 3). Для того чтобы избежать ошибки во время измерения необходимо после синхронизации метки поднять частоту до момента следующей синхронизации, если при синхронизации Вы увидите 2 метки, то предыдущее измерение было верным.
2460 об/мин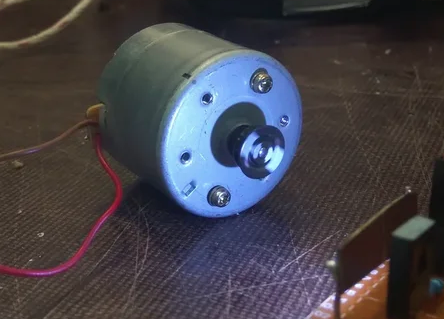 |
1230 об/мин |
