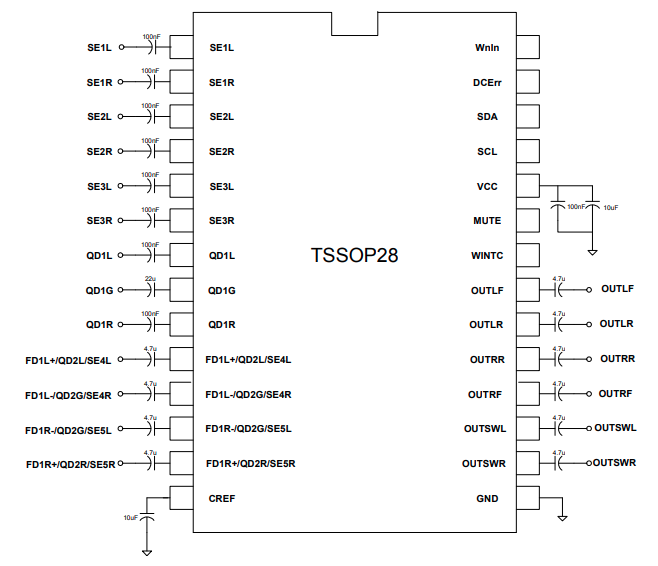
ИМС TDA7718 представляет собой аудиопроцессор с микроконтроллерным управлением. TDA7718 в своем функциональном составе имеет коммутатор входов, 6 канальный выход, регулятор громкости, аттенюатор выходов, регуляторы тембра, полосовые фильтры. Управление аудиопроцессором осуществляется при помощи шины I2C.
Основные характеристики TDA7718:
- Электрические характеристики:
- Напряжение питания от 7,5 до 10 В, рекомендуемое напряжение питания 8,5 В
- Ток потребления 29 мА
- Входное сопротивление 100 кОм
- Максимальное выходное напряжение 2.2 VRMS
- Максимальное входное напряжение 2.0 VRMS
- Отношение сигнал/шум 104 дБ
- Коэффициент нелинейных искажений 0,01%
- Разделение каналов 90 дБ
- Тонкомпенсация:
- Диапазон регулировки аттенюатора от 0 до 15 дБ, с шагом 1 дБ
- Регулировка центральной полосы: 400, 800, 2400 Гц
- Регулятор громкости от -31 до 21 дБ, с шагом 1 дБ
- Регулятор тембра BASS (НЧ):
- Регулировка уровня от -15 до 15 дБ, с шагом 1 дБ
- Регулировка центральной полосы: 60, 80, 100, 200 Гц
- Регулировка добротности: 1, 1.25, 1.5, 2
- Регулятор тембра MIDDLE (СЧ):
- Регулировка уровня от -15 до 15 дБ, с шагом 1 дБ
- Регулировка центральной полосы: 0.5, 1, 1.5, 2.5 кГц
- Регулировка добротности: 0.75, 1, 1.25
- Регулятор тембра TREBLE (ВЧ):
- Регулировка уровня от -15 до 15 дБ, с шагом 1 дБ
- Регулировка центральной полосы: 10, 12.5, 15, 17.5 кГц
- Аттенюаторы выхода: независимые для каждого выхода (LF, RF, LR, RR, SL, SR) от -79 до 0 дБ
- Режим MUTE: уровень -90 дБ
- Сабвуфер:
- 2 выхода (SL, SR)
- Регулировка фильтра: 55, 85, 120, 160 Гц
- Регулировка фазы (0, 180)
- Вход:
- 3 стерео входа для TDA7718B и 5 для TDA7718N
- 1 псевдодифференциальный вход
- 1 дифференциальный вход
На базе Arduino можно организовать управление всеми функциями аудиопроцессора. Для простоты управления можно воспользоваться библиотекой — https://github.com/liman324/TDA7718.git
Для тестового запуска используйте следующий скетч:
#include <WIre.h> #include <TDA7718.h> TDA7718 tda; void setup(){ delay(1000); audio(); } void loop(){} void audio(){ tda.setMain(0,0,0,0); // 0,0,0,0 // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 SE4 / 6 SE5 / 7 MUTE === TDA7718N // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 MUTE / 6 MUTE / 7 MUTE === TDA7718B // fd_qd - 0 FD / 1 QD2 // main_gain - 0 0dB / 1 3dB // sub_flat - 0 off / 1 on tda.setSoft_mute(1,0,1,0,0,0,0);// 1,0,1,0,0,0,0 // soft_mute - 0 on / 1 off // pin_iic - 0 pin_and_iic / 1 iic // soft_mute_time - 0 0.48ms / 1 0.96ms / 2 7.68ms / 3 15.63ms // sub_in - 0 input_mux / 1 bass_output // sub_eneble - 0 on / 1 off // fast_ch - 0 on / 1 off // anty_filter - 0 on / off(bypass) tda.setSoft_step_1(0,0,0,0,0,0,0,0); // 0,0,0,0,0,0,0,0 // all - 0 on / 1 off tda.setSoft_step_2(0,0,0,0,1,1); // 0,0,0,0,1,1 // rr_soft - 0 on / 1 off // sub_l_soft - 0 on / 1 off // sub_r_soft - 0 on / 1 off // soft_time - 0 5ms / 1 10ms // zero - 0 100mV / 1 75mV / 2 50mV / 3 25mV // spike - 0 11mkS / 1 22mkS / 2 33mkS / 3 44mkS tda.setLoudness(0,0,0,0); // 0,0,0,0 // lon_att - byte 0...15 = 0...-15dB // lon_cen_f - 0 flat / 1 400Hz / 2 800Hz / 3 2400Hz // lon_h_boost - 0 on / 1 off // lon_soft_step - 0 act / 1 wait tda.setVolume_gain(-20,1,0); // 0,0,0 // vol_gain - int -31...23 = -31...+23dB // vol_out_gain - 0 1dB / 1 0dB // vol_soft_step - 0 act / 1 wait tda.setTreble(12,0,0); // 0,0,0 // treb - int -15...+15 = -15...+15dB // treb_cen_f - 0 10.0kHz / 1 12.5kHz / 2 15.0kHz / 3 17.5 kHz // treb_soft_step - 0 act / 1 wait tda.setMiddle(0,0,0); // 0,0,0 // mid - int -15...+15 = -15...+15dB // mid_q - 0 0.75 / 1 1.0 / 2 1.25 / 3 reserved // mid_soft_step - 0 act / 1 wait tda.setBass(5,0,0); // 0,0,0 // bass - int -15...+15 = -15...+15dB // bass_q - 0 1.0 / 1 1.25 / 2 1.5 / 3 2.0 // bass_soft_step - 0 act / 1 wait tda.setSub_Mid_Bass(0,0,2,3,0); // 0,0,0,0,0 // sub_cen_f - 0 55Hz / 1 85Hz / 2 120Hz / 3 160Hz // sub_faza - 0 180deg / 1 0deg // mid_cen_f - 0 500Hz / 1 1000Hz / 2 1500Hz / 3 2500Hz // bass_cen_f - 0 60Hz / 1 80Hz / 2 100Hz / 3 200Hz // bass_dc - 0 on / 1 off tda.setLF(0,0); tda.setRF(0,0); tda.setLR(0,0); tda.setRR(0,0); tda.setSL(0,0); tda.setSR(0,0); // all int -79...+15 = -79...+15dB // all - 0 act / 1 wait }
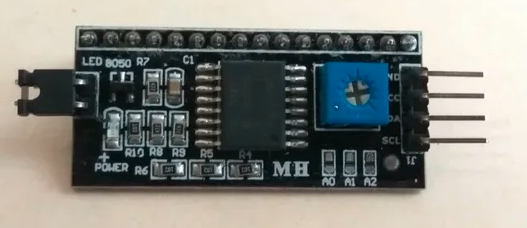
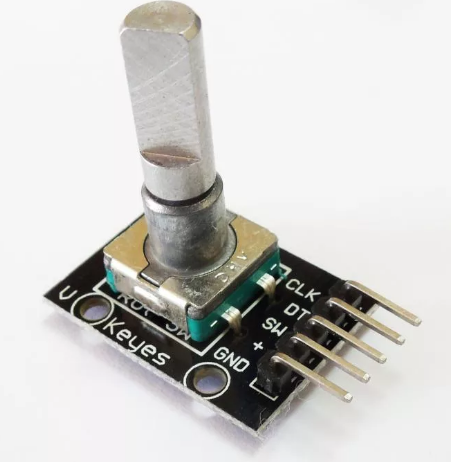
Далее показан пример регулятора тембра и громкости на основе TDA7718B, дополнительно используется энкодер ky-040, три кнопки и ИК-приемник. Информация о текущих настройках выводится на LCD2004 c I2C модулем на базе микросхемs PCF8574.
 |
 |
Регулятор тембра и громкости имеет в своем составе коммутатор 3 три входа с независимой для каждого входа регулировкой уровня. Регуляторы тембра, регулятор громкости, аттенюаторы выходов, регуляторы центральных полос и добротности. Все параметры сохраняются в энергонезависимой памяти.
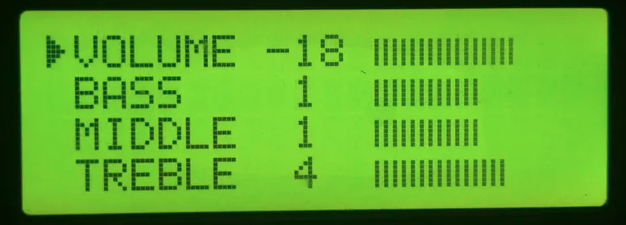
Регулятор тембра и громкости содержит три меню, первое и основное позволяет регулировать громкость и тембры. Все функции этого меню продублированы ИК-пультом. Значения регуляторов выводятся в дБ. Для перехода по параметрам необходимо нажимать кнопку энкодера.
Дополнительно используются три кнопки (коммутация — замыкание на GND), первая кнопка осуществляет переход в меню с редко изменяемыми параметрами, вторая кнопка позволяет переключать входы, при этом поворотом ручки энкодера можно настроить усиление каждого входа, третья кнопки активирует режим MUTE. Все три кнопки продублированы ИК-пультом.
Второе и третье меню содержит редко изменяемые параметры, регулировка параметров осуществляется только при помощи энкодера.

После загрузки скетча необходимо открыть монитор порта и получить коды кнопок Вашего ИК-пульта, которые необходимо вписать в скетч.
#define IR_1 0x2FDD02F // Кнопка вверх #define IR_2 0x2FD32CD // Кнопка вниз #define IR_3 0x2FD906F // Кнопка > #define IR_4 0x2FDF20D // Кнопка < #define IR_5 0x2FD708F // Кнопка IN #define IR_6 0x2FDB24D // Кнопка MUTE #include <Wire.h> // Входит в состав Arduino IDE #include <LiquidCrystal_I2C.h> // http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 #include <TDA7718.h> // https://github.com/liman324/TDA7718.git #include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip #include <EEPROM.h> // Входит в состав Arduino IDE #include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip #include <boarddefs.h> // Входит в состав IRremote #include <IRremote.h> // http://rcl-radio.ru/wp-content/uploads/2019/06/IRremote.zip TDA7718 tda; LiquidCrystal_I2C lcd(0x27,20,4); // Устанавливаем дисплей Encoder myEnc(8, 9);// DT, CLK IRrecv irrecv(12); // указываем вывод модуля IR приемника decode_results ir; byte a1[8] = {0b00000,0b10101,0b10101,0b10101,0b10101,0b10101,0b10101,0b00000}; byte a2[8] = {0b00000,0b10100,0b10100,0b10100,0b10100,0b10100,0b10100,0b00000}; byte a3[8] = {0b00000,0b10000,0b10000,0b10000,0b10000,0b10000,0b10000,0b00000}; byte a4[8] = {0b10000,0b11000,0b11100,0b11110,0b11100,0b11000,0b10000,0b00000}; unsigned long time,times_in,oldPosition = -999,newPosition; int temp0,menu0,menu, bass,vol,mid,treb,vol_d,bass_d,treb_d,mid_d; byte q,www,w,w2[4],z,z0,z1,i,menu_1,menu_2,w3,ch,mut=1,gr1,gr2; int gain0,gain1,gain2,gain3,gain_d; int bass_f,bass_q,treb_f,treb_q,mid_f,mid_q,loud_f,loud_g,sub_f,sl,sr,faza,in,in_x,lf,rf,lr,rr; byte mesto[8]={4,13,4,13,4,13,4,13}; byte mesto1[8]={0,0,1,1,2,2,3,3}; byte mesto2[8]={0,11,0,11,0,11,0,11}; byte mesto3[8]={0,0,1,1,2,2,3,3}; String bass_nam[4]={"60 Hz", "80 Hz", "100 Hz", "200 Hz"}; String treb_nam[4]={"10 kHz", "12.5kHz", "15 kHz", "17.5kHz"}; String mid_nam[4] ={"500 Hz", "1 kHz", "1.5 kHz", "2.5 kHz"}; String lon_nam[4] ={"FLAT ", "400 Hz", "800 Hz", "2.4 kHz"}; String sub_nam[4] ={" 55Hz", " 85Hz", "120Hz", "160Hz"}; float bass_nam_1[4]={1.0, 1.25, 1.5, 2.0}; float mid_nam_1[3]={0.75, 1.0, 1.25}; void setup(){Serial.begin(9600); irrecv.enableIRIn();lcd.init();lcd.backlight(); lcd.setCursor(0,1);lcd.print(" Sound Processor");lcd.setCursor(0,2);lcd.print(" TDA7718 "); delay(2000);lcd.clear(); lcd.createChar(0,a1);lcd.createChar(1,a2);lcd.createChar(2,a3);lcd.createChar(3,a4); MsTimer2::set(1, to_Timer);MsTimer2::start(); pinMode(10,INPUT); // МЕНЮ КНОПКА SW энкодера pinMode(2,INPUT_PULLUP); // МЕНЮ НАСТРОЕК pinMode(3,INPUT_PULLUP); // IN pinMode(4,INPUT_PULLUP); // MUTE if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении vol = EEPROM.read(0)-59;treb = EEPROM.read(1)-15;mid = EEPROM.read(2)-15;bass = EEPROM.read(3)-15; in = EEPROM.read(4);gain1 = EEPROM.read(5);gain2 = EEPROM.read(6);gain3 = EEPROM.read(7); bass_f = EEPROM.read(8);bass_q = EEPROM.read(9);treb_f = EEPROM.read(10);sr = EEPROM.read(11); mid_f = EEPROM.read(12);mid_q = EEPROM.read(13);loud_f = EEPROM.read(14);loud_g= EEPROM.read(15); lf = EEPROM.read(16)-79;rf = EEPROM.read(17)-79;lr = EEPROM.read(18)-79;rr = EEPROM.read(19)-79;sl = EEPROM.read(20)-79;sub_f = EEPROM.read(21); faza = EEPROM.read(22); switch(in){case 0: gain0 = gain1;break;case 1: gain0 = gain2;break;case 2: gain0 = gain3;break;} w2_arr();audio(); } void loop(){ if(digitalRead(10)==LOW&&menu0==0){menu++;delay(200);time=millis();w=1;w2_arr();if(menu>3){menu=0;}}// меню 0 if(digitalRead(10)==LOW&&menu0==1){menu_1++;delay(200);time=millis();w=1;if(menu_1>7){menu_1=0;}}// меню 1 if(digitalRead(10)==LOW&&menu0==2){menu_2++;delay(200);time=millis();w=1;if(menu_2>7){menu_2=0;}}// меню 2 if(digitalRead(2)==LOW){menu0++;cl();delay(200);time=millis();w=1;w2_arr();menu=0;menu_1=0;menu_2=0;if(menu0>2){menu0=0;}}// меню if(digitalRead(3)==LOW||ir.value==IR_5){in++;cl();gr1=0;gr2=0;ir.value=0;times_in=millis();in_x=1;w3=1;www=1;menu0=100;if(in>2){in=0;}} if(digitalRead(4)==LOW&&mut==1||ir.value==IR_6&&mut==1){mut=0;gr1=0;gr2=0;menu0=100;cl();ir.value=0;audio();lcd.setCursor(7,1);lcd.print(" MUTE");delay(200);} if(digitalRead(4)==LOW&&mut==0||ir.value==IR_6&&mut==0){mut=1;gr1=0;gr2=0;menu0=0;cl();ir.value=0;w2_arr();delay(200);audio();} ////////////////////// IR ///////////////////////////////////////////////// if ( irrecv.decode( &ir )) {Serial.print("0x");Serial.println( ir.value,HEX);irrecv.resume();time=millis();w=1;}// IR приемник - чтение, в мониторе порта отображаются коды кнопок if(ir.value==0){gr1=0;gr2=0;}// запрет нажатий не активных кнопок пульта if(ir.value==IR_2&&menu0==0){menu++;gr1=0;gr2=0;cl1();time=millis();w=1;if(menu>3){menu=0;}}// кнопка вверх if(ir.value==IR_1&&menu0==0){menu--;gr1=0;gr2=0;cl1();time=millis();w=1;if(menu<0){menu=3;}}// кнопка вниз /////////////////////////////// MENU0 = VOLUME TERBLE MIDDLE BASS /////////////////////////////////////////////////////////////////////// if(menu0==0){ switch(menu){ case 0: temp0 = vol;q=0;break; case 1: temp0 = bass;q=1;break; case 2: temp0 = mid;q=2;break; case 3: temp0 = treb;q=3;break;} if(ir.value==IR_3){temp0++;gr1=1;gr2=0;cl1();time=millis();w=1;w2[q]=1;www=1;}// кнопка > if(ir.value==0xFFFFFFFF and gr1==1){temp0++;gr2=0;cl1();time=millis();;w=1;w2[q]=1;www=1;}// кнопка >>>>>> if(ir.value==IR_4){temp0--;gr1=0;gr2=1;cl1();time=millis();;w=1;w2[q]=1;www=1;}// кнопка < if(ir.value==0xFFFFFFFF and gr2==1){temp0--;gr1=0;cl1();time=millis();w=1;w2[q]=1;www=1;}// кнопка <<<<<< if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;w2[q]=1;www=1;} switch(menu){ case 0: vol = temp0;vol_func();break; case 1: bass = temp0;bass_func();break; case 2: mid = temp0;mid_func();break; case 3: treb = temp0;treb_func();break;} au(); for(i=0;i<4;i++){if(menu==i){lcd.setCursor(0,i);lcd.write((uint8_t)3);}else{lcd.setCursor(0,i);lcd.print(" ");}} lcd.setCursor(1,0);lcd.print("VOLUME ");if(vol>=0){lcd.print(" ");}lcd.print(vol);lcd.print(" ");vol_d=map(vol,-59,0,0,24); lcd.setCursor(1,1);lcd.print("BASS ");if(bass>=0){lcd.print(" ");}lcd.print(bass);lcd.print(" ");bass_d=map(bass,-15,15,0,24); lcd.setCursor(1,2);lcd.print("MIDDLE ");if(mid>=0){lcd.print(" ");}lcd.print(mid);lcd.print(" ");mid_d=map(mid,-15,15,0,24); lcd.setCursor(1,3);lcd.print("TREBLE ");if(treb>=0){lcd.print(" ");}lcd.print(treb);lcd.print(" ");treb_d=map(treb,-15,15,0,24); if(w2[0]==1){ for(z=0,z0=0,z1=0;z<=vol_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,0);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,0);lcd.print(" ");}} if(z1==3){lcd.setCursor(z0+12,0);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,0);lcd.write((uint8_t)2);}w2[0]=0;} if(w2[1]==1){ for(z=0,z0=0,z1=0;z<=bass_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,1);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,1);if(bass<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,1);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,1);lcd.write((uint8_t)2);}w2[1]=0;} if(w2[2]==1){ for(z=0,z0=0,z1=0;z<=mid_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,2);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,2);if(mid<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,2);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,2);lcd.write((uint8_t)2);}w2[2]=0;} if(w2[3]==1){ for(z=0,z0=0,z1=0;z<=treb_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,3);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,3);if(treb<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,3);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,3);lcd.write((uint8_t)2);}w2[3]=0;} }// menu0 = 0 /////////////////////////////////////////////////////////////////////////////////////////////// ///////////////////// MENU 2 //////////////////////////////////////////////////////// if(menu0==1){ switch(menu_1){ case 0: temp0 = bass_f;break; case 1: temp0 = bass_q;break; case 2: temp0 = mid_f;break; case 3: temp0 = mid_q;break; case 4: temp0 = treb_f;break; case 5: break; case 6: temp0 = loud_f;break; case 7: temp0 = loud_g;break;} if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;www=1;} switch(menu_1){ case 0: bass_f = temp0;bass_f_func();break; case 1: bass_q = temp0;bass_q_func();break; case 2: mid_f = temp0;mid_f_func();break; case 3: mid_q = temp0;mid_q_func();break; case 4: treb_f = temp0;treb_f_func();break; case 5: break; case 6: loud_f = temp0;loud_f_func();break; case 7: loud_g = temp0;loud_g_func();break;} au(); for(i=0;i<8;i++){if(menu_1==i){lcd.setCursor(mesto[i],mesto1[i]);lcd.write((uint8_t)3);}else{lcd.setCursor(mesto[i],mesto1[i]);lcd.print(" ");}} lcd.setCursor(0,0);lcd.print("BASS");lcd.setCursor(5,0);lcd.print(bass_nam[bass_f]);lcd.setCursor(14,0);lcd.print("Q ");lcd.print(bass_nam_1[bass_q]); lcd.setCursor(0,1);lcd.print("MIDD");lcd.setCursor(5,1);lcd.print(mid_nam[mid_f]);lcd.setCursor(14,1);lcd.print("Q ");lcd.print(mid_nam_1[mid_q]); lcd.setCursor(0,2);lcd.print("TREB");lcd.setCursor(5,2);lcd.print(treb_nam[treb_f]);lcd.setCursor(14,2);lcd.print("Q N/A"); lcd.setCursor(0,3);lcd.print("LOUD");lcd.setCursor(5,3);lcd.print(lon_nam[loud_f]);lcd.setCursor(14,3);lcd.print("G ");lcd.print(loud_g/10);lcd.print(loud_g%10);lcd.setCursor(18,3);lcd.print("dB"); }// menu0 = 1 //////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// if(menu0==2){ switch(menu_2){ case 0: temp0 = lf;break; case 1: temp0 = rf;break; case 2: temp0 = lr;break; case 3: temp0 = rr;break; case 4: temp0 = sl;break; case 5: temp0 = sr;break; case 6: temp0 = faza;break; case 7: temp0 = sub_f;break;} if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;www=1;} switch(menu_2){ case 0: lf = temp0;lf_func();break; case 1: rf = temp0;rf_func();break; case 2: lr = temp0;lr_func();break; case 3: rr = temp0;rr_func();break; case 4: sl = temp0;sl_func();break; case 5: sr = temp0;sr_func();break; case 6: faza = temp0;faza_func();break; case 7: sub_f = temp0;sub_f_func();break;} au(); for(i=0;i<8;i++){if(menu_2==i){lcd.setCursor(mesto2[i],mesto3[i]);lcd.write((uint8_t)3);}else{lcd.setCursor(mesto2[i],mesto3[i]);lcd.print(" ");}} lcd.setCursor(1,0);lcd.print("LF");lcd.setCursor(4,0);lcd.print(lf);lcd.print(" ");lcd.setCursor(7,0);lcd.print("dB ");lcd.setCursor(12,0);lcd.print("RF ");lcd.print(rf);lcd.print(" ");lcd.setCursor(18,0);lcd.print("dB"); lcd.setCursor(1,1);lcd.print("LR");lcd.setCursor(4,1);lcd.print(lr);lcd.print(" ");lcd.setCursor(7,1);lcd.print("dB ");lcd.setCursor(12,1);lcd.print("RR ");lcd.print(rr);lcd.print(" ");lcd.setCursor(18,1);lcd.print("dB"); lcd.setCursor(1,2);lcd.print("SL");lcd.setCursor(4,2);lcd.print(sl);lcd.print(" ");lcd.setCursor(7,2);lcd.print("dB ");lcd.setCursor(12,2);lcd.print("SR ");lcd.print(sr);lcd.print(" ");lcd.setCursor(18,2);lcd.print("dB"); lcd.setCursor(1,3);lcd.print("Faza ");if(faza==0){lcd.print(" 0");}else{lcd.print("180");}lcd.setCursor(12,3);lcd.print("Sf ");lcd.print(sub_nam[sub_f]); } // menu0 = 2 ////////////////////////// GAIN IN ///////////////////////////////////////////////////////////////////////////////////// if(in_x==1){ menu0=100; switch(in){ case 0: ch=0;break; case 1: ch=4;break; case 2: ch=1;break; } switch(ch){ case 0: gain0 = gain1;break; case 4: gain0 = gain2;break; case 1: gain0 = gain3;break;} if (newPosition != oldPosition) {oldPosition = newPosition; gain0=gain0+newPosition;myEnc.write(0);newPosition=0;time=millis();times_in=millis();www=1;w=1;w3=1;gain_func();} switch(ch){ case 0: gain1 = gain0;break; case 4: gain2 = gain0;break; case 1: gain3 = gain0;break;} au(); lcd.setCursor(2,1);lcd.print("Gain IN ");lcd.print(in+1);lcd.setCursor(12,1);lcd.print(" ");lcd.print(gain0);lcd.print(" ");lcd.setCursor(16,1);lcd.print("dB");gain_d=map(gain0, -31,23,0,20); if(w3==1){ for(z=0,z0=0,z1=0;z<=gain_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+7,2);lcd.write((uint8_t)0);lcd.setCursor(z0+1+7,2);lcd.print(" ");}} if(z1==3){lcd.setCursor(z0+7,2);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+7,2);lcd.write((uint8_t)2);}} w3=0; if(millis()-times_in>3000){in_x=0;cl();menu0=0;w2_arr();}} ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// ///////////////////// EEPROM /////////////////////////////////////////////////////////////// if(millis()-time>10000 && w==1){ EEPROM.update(0,vol+59);EEPROM.update(1,treb+15);EEPROM.update(2,mid+15);EEPROM.update(3,bass+15); EEPROM.update(4,in);EEPROM.update(5,gain1);EEPROM.update(6,gain2);EEPROM.update(7,gain3); EEPROM.update(8,bass_f);EEPROM.update(9,bass_q);EEPROM.update(10,treb_f);EEPROM.update(11,sr), EEPROM.update(12,mid_f);EEPROM.update(13,mid_q);EEPROM.update(14,loud_f);EEPROM.update(15,loud_g); EEPROM.update(16,lf+79);EEPROM.update(17,rf+79);EEPROM.update(18,lr+79);EEPROM.update(19,rr+79);EEPROM.update(20,sl+79);EEPROM.update(21,sub_f); EEPROM.update(22,faza); menu=0;menu_1=0;menu_2=0;w=0;w2_arr();} }//loop void lf_func(){if(lf<0){lf=0;}if(lf>20){lf=20;}}; void rf_func(){if(rf<0){rf=0;}if(rf>20){rf=20;}}; void lr_func(){if(lr<0){lr=0;}if(lr>20){lr=20;}}; void rr_func(){if(rr<0){rr=0;}if(rr>20){rr=20;}}; void sl_func(){if(sl<0){sl=0;}if(sl>20){sl=20;}}; void sr_func(){if(sr<0){sr=0;}if(sr>20){sr=20;}}; void gain_func(){if(gain0<-31){gain0=-31;}if(gain0>23){gain0=23;}} void faza_func(){if(faza>1){faza=0;}if(faza<0){faza=1;}} void sub_f_func(){if(sub_f>3){sub_f=0;}if(sub_f<0){sub_f=3;}} void loud_g_func(){if(loud_g>15){loud_g=15;}if(loud_g<0){loud_g=0;}} void mid_q_func(){if(mid_q>2){mid_q=0;}if(mid_q<0){mid_q=3;}} void bass_q_func(){if(bass_q>3){bass_q=0;}if(bass_q<0){bass_q=3;}} void mid_f_func(){if(mid_f>3){mid_f=0;}if(mid_f<0){mid_f=3;}} void treb_f_func(){if(treb_f>3){treb_f=0;}if(treb_f<0){treb_f=3;}} void bass_f_func(){if(bass_f>3){bass_f=0;}if(bass_f<0){bass_f=3;}} void loud_f_func(){if(loud_f>3){loud_f=0;}if(loud_f<0){loud_f=3;}} void w2_arr(){w2[0]=1;w2[1]=1;w2[2]=1;w2[3]=1;} void au(){if(www==1){audio();www=0;}} void bass_func(){if(bass>15){bass=15;}if(bass<-15){bass=-15;}} void mid_func(){if(mid>15){mid=15;}if(mid<-15){mid=-15;}} void treb_func(){if(treb>15){treb=15;}if(treb<-15){treb=-15;}} void vol_func(){if(vol<-59){vol=-59;}if(vol>0){vol=0;}} void cl(){ir.value=0;delay(300);lcd.clear();} void cl1(){ir.value=0;delay(200);} void to_Timer(){newPosition = myEnc.read()/4;} void audio(){ tda.setMain(ch,0,0,0); // 0,0,0,0 // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 SE4 / 6 SE5 / 7 MUTE === TDA7718N // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 MUTE / 6 MUTE / 7 MUTE === TDA7718B // fd_qd - 0 FD / 1 QD2 // main_gain - 0 0dB / 1 3dB // sub_flat - 0 off / 1 on tda.setSoft_mute(mut,0,1,0,0,0,0);// 1,0,1,0,0,0,0 // soft_mute - 0 on / 1 off // pin_iic - 0 pin_and_iic / 1 iic // soft_mute_time - 0 0.48ms / 1 0.96ms / 2 7.68ms / 3 15.63ms // sub_in - 0 input_mux / 1 bass_output // sub_eneble - 0 on / 1 off // fast_ch - 0 on / 1 off // anty_filter - 0 on / off(bypass) tda.setSoft_step_1(0,0,0,0,0,0,0,0); // 0,0,0,0,0,0,0,0 // all - 0 on / 1 off tda.setSoft_step_2(0,0,0,0,1,1); // 0,0,0,0,1,1 // rr_soft - 0 on / 1 off // sub_l_soft - 0 on / 1 off // sub_r_soft - 0 on / 1 off // soft_time - 0 5ms / 1 10ms // zero - 0 100mV / 1 75mV / 2 50mV / 3 25mV // spike - 0 11mkS / 1 22mkS / 2 33mkS / 3 44mkS tda.setLoudness(loud_g,loud_f,0,0); // 0,0,0,0 // lon_att - byte 0...15 = 0...-15dB // lon_cen_f - 0 flat / 1 400Hz / 2 800Hz / 3 2400Hz // lon_h_boost - 0 on / 1 off // lon_soft_step - 0 act / 1 wait tda.setVolume_gain(gain0,1,0); // 0,0,0 // vol_gain - int -31...23 = -31...+23dB // vol_out_gain - 0 1dB / 1 0dB // vol_soft_step - 0 act / 1 wait tda.setTreble(treb,treb_f,0); // 0,0,0 // treb - int -15...+15 = -15...+15dB // treb_cen_f - 0 10.0kHz / 1 12.5kHz / 2 15.0kHz / 3 17.5 kHz // treb_soft_step - 0 act / 1 wait tda.setMiddle(mid,mid_q,0); // 0,0,0 // mid - int -15...+15 = -15...+15dB // mid_q - 0 0.75 / 1 1.0 / 2 1.25 / 3 reserved // mid_soft_step - 0 act / 1 wait tda.setBass(bass,bass_q,0); // 0,0,0 // bass - int -15...+15 = -15...+15dB // bass_q - 0 1.0 / 1 1.25 / 2 1.5 / 3 2.0 // bass_soft_step - 0 act / 1 wait tda.setSub_Mid_Bass(sub_f,faza,mid_f,bass_f,0); // 0,0,0,0,0 // sub_cen_f - 0 55Hz / 1 85Hz / 2 120Hz / 3 160Hz // sub_faza - 0 180deg / 1 0deg // mid_cen_f - 0 500Hz / 1 1000Hz / 2 1500Hz / 3 2500Hz // bass_cen_f - 0 60Hz / 1 80Hz / 2 100Hz / 3 200Hz // bass_dc - 0 on / 1 off tda.setLF(vol-20+lf,0); tda.setRF(vol-20+rf,0); tda.setLR(vol-20+lr,0); tda.setRR(vol-20+rr,0); tda.setSL(vol-20+sl,0); tda.setSR(vol-20+sr,0); // all int -79...+15 = -79...+15dB // all - 0 act / 1 wait }
Форум — http://forum.rcl-radio.ru/viewtopic.php?id=176
Библиотека IRremote изменена!!!
Удалите свою версию библиотеки если она у Вас была ранее установлена, далее установите измененную библиотеку IRremote — http://rcl-radio.ru/wp-content/uploads/2019/06/IRremote.zip
TDA7718 + STANDBY + DS3231
Добавлена функция STANDBY. При активации режима STANDBY на выходе D7 появляется лог. ноль для управления режимом STANDBY усилителя, а так же на экран выводится текущее время.
Установка времени возможна по времени компиляции (см. setup) и ручная корректировка времени, для этого в режиме STANDBY нажмите и удерживайте кнопку MENU, для корректировки часов нажмите кнопку IN, для минут кнопку MUTE, для обнуления секунд кнопку STANDBY.

#define IR_1 0x2FDD02F // Кнопка вверх #define IR_2 0x2FD32CD // Кнопка вниз #define IR_3 0x2FD906F // Кнопка > #define IR_4 0x2FDF20D // Кнопка < #define IR_5 0x2FD708F // Кнопка IN #define IR_6 0x2FDB24D // Кнопка MUTE #define IR_7 0x2FD00FF // POWER #include <Wire.h> // Входит в состав Arduino IDE #include <LiquidCrystal_I2C.h> // http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1 #include <TDA7718.h> // https://github.com/liman324/TDA7718.git #include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip #include <EEPROM.h> // Входит в состав Arduino IDE #include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip #include <boarddefs.h> // Входит в состав IRremote #include <IRremote.h> // http://rcl-radio.ru/wp-content/uploads/2019/06/IRremote.zip #include <DS3231.h> //https://github.com/jarzebski/Arduino-DS3231/archive/master.zip TDA7718 tda; LiquidCrystal_I2C lcd(0x27,20,4); // Устанавливаем дисплей Encoder myEnc(8, 9);// DT, CLK IRrecv irrecv(12); // указываем вывод модуля IR приемника decode_results ir; DS3231 clock;RTCDateTime DateTime; unsigned long time,times_in,oldPosition = -999,newPosition; int temp0,menu0,menu, bass,vol,mid,treb,vol_d,bass_d,treb_d,mid_d,hour,minut,secon; byte q,www,w,w2[4],z,z0,z1,i,menu_1,menu_2,w3,ch,mut=1,gr1,gr2,power; int gain0,gain1,gain2,gain3,gain_d; int bass_f,bass_q,treb_f,treb_q,mid_f,mid_q,loud_f,loud_g,sub_f,sl,sr,faza,in,in_x,lf,rf,lr,rr; byte mesto[8]={4,13,4,13,4,13,4,13}; byte mesto1[8]={0,0,1,1,2,2,3,3}; byte mesto2[8]={0,11,0,11,0,11,0,11}; byte mesto3[8]={0,0,1,1,2,2,3,3}; String bass_nam[4]={"60 Hz", "80 Hz", "100 Hz", "200 Hz"}; String treb_nam[4]={"10 kHz", "12.5kHz", "15 kHz", "17.5kHz"}; String mid_nam[4] ={"500 Hz", "1 kHz", "1.5 kHz", "2.5 kHz"}; String lon_nam[4] ={"FLAT ", "400 Hz", "800 Hz", "2.4 kHz"}; String sub_nam[4] ={" 55Hz", " 85Hz", "120Hz", "160Hz"}; float bass_nam_1[4]={1.0, 1.25, 1.5, 2.0}; float mid_nam_1[3]={0.75, 1.0, 1.25}; void setup(){Serial.begin(9600); irrecv.enableIRIn();lcd.init();lcd.backlight(); lcd.setCursor(0,1);lcd.print(" Sound Processor");lcd.setCursor(0,2);lcd.print(" TDA7718 "); delay(2000);lcd.clear(); MsTimer2::set(1, to_Timer);MsTimer2::start(); pinMode(10,INPUT); // МЕНЮ КНОПКА SW энкодера pinMode(2,INPUT_PULLUP); // МЕНЮ НАСТРОЕК pinMode(3,INPUT_PULLUP); // IN pinMode(4,INPUT_PULLUP); // MUTE pinMode(5,INPUT_PULLUP);// КНОПКА STANDBY pinMode(7,OUTPUT);// STANDBY if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении vol = EEPROM.read(0)-59;treb = EEPROM.read(1)-15;mid = EEPROM.read(2)-15;bass = EEPROM.read(3)-15; in = EEPROM.read(4);gain1 = EEPROM.read(5);gain2 = EEPROM.read(6);gain3 = EEPROM.read(7); bass_f = EEPROM.read(8);bass_q = EEPROM.read(9);treb_f = EEPROM.read(10);sr = EEPROM.read(11); mid_f = EEPROM.read(12);mid_q = EEPROM.read(13);loud_f = EEPROM.read(14);loud_g= EEPROM.read(15); lf = EEPROM.read(16)-79;rf = EEPROM.read(17)-79;lr = EEPROM.read(18)-79;rr = EEPROM.read(19)-79;sl = EEPROM.read(20)-79;sub_f = EEPROM.read(21); faza = EEPROM.read(22); switch(in){case 0: gain0 = gain1;break;case 1: gain0 = gain2;break;case 2: gain0 = gain3;break;} w2_arr();audio(); // УСТАНОВКА ВРЕМЕНИ // clock.setDateTime(2016, 9, 15, 0, 0, 0);// Установка времени вручную (Год, Месяц, День, Час, Минута, Секунда) } void loop(){ DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second; if(digitalRead(10)==LOW&&menu0==0&&power==0){menu++;delay(200);time=millis();w=1;w2_arr();if(menu>3){menu=0;}}// меню 0 if(digitalRead(10)==LOW&&menu0==1&&power==0){menu_1++;delay(200);time=millis();w=1;if(menu_1>7){menu_1=0;}}// меню 1 if(digitalRead(10)==LOW&&menu0==2&&power==0){menu_2++;delay(200);time=millis();w=1;if(menu_2>7){menu_2=0;}}// меню 2 if(digitalRead(2)==LOW&&power==0){menu0++;cl();delay(200);time=millis();w=1;w2_arr();menu=0;menu_1=0;menu_2=0;if(menu0>2){menu0=0;}}// меню if((digitalRead(3)==LOW||ir.value==IR_5)&&power==0){in++;cl();gr1=0;gr2=0;ir.value=0;times_in=millis();in_x=1;w3=1;www=1;menu0=100;if(in>2){in=0;}} if((digitalRead(4)==LOW&&mut==1||ir.value==IR_6&&mut==1)&&power==0){mut=0;gr1=0;gr2=0;menu0=100;cl();ir.value=0;audio();lcd.setCursor(7,1);lcd.print(" MUTE");delay(200);} if((digitalRead(4)==LOW&&mut==0||ir.value==IR_6&&mut==0)&&power==0){mut=1;gr1=0;gr2=0;menu0=0;cl();ir.value=0;w2_arr();delay(200);audio();} //// POWER ////////////////////// if((digitalRead(5)==LOW||ir.value==IR_7)&&power==0&&digitalRead(2)==HIGH&&digitalRead(3)==HIGH&&digitalRead(4)==HIGH){cl();ir.value=0; power=1;mut=0;audio();lcd.clear();lcd.setCursor(5,1);lcd.print("POWER OFF");menu0=100;delay(3000);lcd.noBacklight();}// power off if((digitalRead(5)==LOW||ir.value==IR_7)&&power==1&&digitalRead(2)==HIGH&&digitalRead(3)==HIGH&&digitalRead(4)==HIGH){cl();ir.value=0; power=0;mut=1;audio();lcd.backlight();lcd.clear();lcd.setCursor(5,1);lcd.print("POWER ON ");w=1;w2_arr();menu0=0;myEnc.write(0);audio();delay(3000);lcd.clear();}// power on if(power==0){digitalWrite(7,HIGH); byte a1[8] = {0b00000,0b10101,0b10101,0b10101,0b10101,0b10101,0b10101,0b00000}; byte a2[8] = {0b00000,0b10100,0b10100,0b10100,0b10100,0b10100,0b10100,0b00000}; byte a3[8] = {0b00000,0b10000,0b10000,0b10000,0b10000,0b10000,0b10000,0b00000}; byte a4[8] = {0b10000,0b11000,0b11100,0b11110,0b11100,0b11000,0b10000,0b00000}; lcd.createChar(0,a1);lcd.createChar(1,a2);lcd.createChar(2,a3);lcd.createChar(3,a4); } if(power==1){digitalWrite(7,LOW); byte v1[8] = {7,7,7,7,7,7,7,7}; byte v2[8] = {7,7,0, 0, 0, 0, 0, 0}; byte v3[8] = { 0, 0, 0, 0, 0,0,31,31}; byte v4[8] = {31,31, 0, 0, 0, 0,31,31}; byte v5[8] = { 28, 28, 0, 0, 0, 0, 28, 28}; byte v6[8] = {28,28,28,28,28,28,28,28}; byte v7[8] = { 0, 0, 0, 0, 0, 0,7,7}; byte v8[8] = { 31, 31,0,0,0,0,0, 0}; byte a[6]; byte i0,d1,d2,d3,d4,d5,d6,e1,e2,e3; lcd.createChar(1, v1);lcd.createChar(2, v2);lcd.createChar(3, v3);lcd.createChar(4, v4);lcd.createChar(5, v5);lcd.createChar(6, v6);lcd.createChar(7, v7);lcd.createChar(8, v8); a[0]=DateTime.hour/10; a[1]=DateTime.hour%10; a[2]=DateTime.minute/10; a[3]=DateTime.minute%10; a[4]=DateTime.second/10; a[5]=DateTime.second%10; for(i=0;i<6;i++){ switch(i){ case 0: e1=0,e2=1,e3=2;break; case 1: e1=3,e2=4,e3=5;break; case 2: e1=7,e2=8,e3=9;break; case 3: e1=10,e2=11,e3=12;break; case 4: e1=14,e2=15,e3=16;break; case 5: e1=17,e2=18,e3=19;break; } switch(a[i]){ case 0: d1=1,d2=8,d3=6,d4=1,d5=3,d6=6;break; case 1: d1=32,d2=2,d3=6,d4=32,d5=32,d6=6;break; case 2: d1=2,d2=8,d3=6,d4=1,d5=4,d6=5;break; case 3: d1=2,d2=4,d3=6,d4=7,d5=3,d6=6;break; case 4: d1=1,d2=3,d3=6,d4=32,d5=32,d6=6;break; case 5: d1=1,d2=4,d3=5,d4=7,d5=3,d6=6;break; case 6: d1=1,d2=4,d3=5,d4=1,d5=3,d6=6;break; case 7: d1=1,d2=8,d3=6,d4=32,d5=32,d6=6;break; case 8: d1=1,d2=4,d3=6,d4=1,d5=3,d6=6;break; case 9: d1=1,d2=4,d3=6,d4=7,d5=3,d6=6;break; } lcd.setCursor(e1,0);lcd.write((uint8_t)d1);lcd.setCursor(e2,0);lcd.write((uint8_t)d2);lcd.setCursor(e3,0);lcd.write((uint8_t)d3); lcd.setCursor(e1,1);lcd.write((uint8_t)d4);lcd.setCursor(e2,1);lcd.write((uint8_t)d5);lcd.setCursor(e3,1);lcd.write((uint8_t)d6); } lcd.setCursor(6,0);lcd.print(".");lcd.setCursor(13,0);lcd.print(".");lcd.setCursor(6,1);lcd.print(".");lcd.setCursor(13,1);lcd.print("."); lcd.setCursor(5,3);lcd.print("POWER OFF");lcd.noBacklight(); if(digitalRead(2)==LOW&&digitalRead(3)==LOW){hour++;if(hour>23){hour=0;} clock.setDateTime(2020, 9, 15, hour, minut, secon);delay(100);} if(digitalRead(2)==LOW&&digitalRead(4)==LOW){minut++;if(minut>59){minut=0;} clock.setDateTime(2020, 9, 15, hour, minut, secon);delay(100); } if(digitalRead(2)==LOW&&digitalRead(5)==LOW){secon=0; clock.setDateTime(2020, 9, 15, hour, minut, secon);delay(100); } } ////////////////////// IR ///////////////////////////////////////////////// if ( irrecv.decode( &ir )) {Serial.print("0x");Serial.println( ir.value,HEX);irrecv.resume();time=millis();w=1;}// IR приемник - чтение, в мониторе порта отображаются коды кнопок if(ir.value==0){gr1=0;gr2=0;}// запрет нажатий не активных кнопок пульта if(ir.value==IR_2&&menu0==0&&power==0){menu++;gr1=0;gr2=0;cl1();time=millis();w=1;if(menu>3){menu=0;}}// кнопка вверх if(ir.value==IR_1&&menu0==0&&power==0){menu--;gr1=0;gr2=0;cl1();time=millis();w=1;if(menu<0){menu=3;}}// кнопка вниз /////////////////////////////// MENU0 = VOLUME TERBLE MIDDLE BASS /////////////////////////////////////////////////////////////////////// if(menu0==0){ switch(menu){ case 0: temp0 = vol;q=0;break; case 1: temp0 = bass;q=1;break; case 2: temp0 = mid;q=2;break; case 3: temp0 = treb;q=3;break;} if(ir.value==IR_3){temp0++;gr1=1;gr2=0;cl1();time=millis();w=1;w2[q]=1;www=1;}// кнопка > if(ir.value==0xFFFFFFFF and gr1==1){temp0++;gr2=0;cl1();time=millis();;w=1;w2[q]=1;www=1;}// кнопка >>>>>> if(ir.value==IR_4){temp0--;gr1=0;gr2=1;cl1();time=millis();;w=1;w2[q]=1;www=1;}// кнопка < if(ir.value==0xFFFFFFFF and gr2==1){temp0--;gr1=0;cl1();time=millis();w=1;w2[q]=1;www=1;}// кнопка <<<<<< if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;w2[q]=1;www=1;} switch(menu){ case 0: vol = temp0;vol_func();break; case 1: bass = temp0;bass_func();break; case 2: mid = temp0;mid_func();break; case 3: treb = temp0;treb_func();break;} au(); for(i=0;i<4;i++){if(menu==i){lcd.setCursor(0,i);lcd.write((uint8_t)3);}else{lcd.setCursor(0,i);lcd.print(" ");}} lcd.setCursor(1,0);lcd.print("VOLUME ");if(vol>=0){lcd.print(" ");}lcd.print(vol);lcd.print(" ");vol_d=map(vol,-59,0,0,24); lcd.setCursor(1,1);lcd.print("BASS ");if(bass>=0){lcd.print(" ");}lcd.print(bass);lcd.print(" ");bass_d=map(bass,-15,15,0,24); lcd.setCursor(1,2);lcd.print("MIDDLE ");if(mid>=0){lcd.print(" ");}lcd.print(mid);lcd.print(" ");mid_d=map(mid,-15,15,0,24); lcd.setCursor(1,3);lcd.print("TREBLE ");if(treb>=0){lcd.print(" ");}lcd.print(treb);lcd.print(" ");treb_d=map(treb,-15,15,0,24); if(w2[0]==1){ for(z=0,z0=0,z1=0;z<=vol_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,0);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,0);lcd.print(" ");}} if(z1==3){lcd.setCursor(z0+12,0);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,0);lcd.write((uint8_t)2);}w2[0]=0;} if(w2[1]==1){ for(z=0,z0=0,z1=0;z<=bass_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,1);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,1);if(bass<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,1);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,1);lcd.write((uint8_t)2);}w2[1]=0;} if(w2[2]==1){ for(z=0,z0=0,z1=0;z<=mid_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,2);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,2);if(mid<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,2);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,2);lcd.write((uint8_t)2);}w2[2]=0;} if(w2[3]==1){ for(z=0,z0=0,z1=0;z<=treb_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+12,3);lcd.write((uint8_t)0);lcd.setCursor(z0+1+12,3);if(treb<12){lcd.print(" ");}else{lcd.print(" ");}}} if(z1==3){lcd.setCursor(z0+12,3);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+12,3);lcd.write((uint8_t)2);}w2[3]=0;} }// menu0 = 0 /////////////////////////////////////////////////////////////////////////////////////////////// ///////////////////// MENU 2 //////////////////////////////////////////////////////// if(menu0==1){ switch(menu_1){ case 0: temp0 = bass_f;break; case 1: temp0 = bass_q;break; case 2: temp0 = mid_f;break; case 3: temp0 = mid_q;break; case 4: temp0 = treb_f;break; case 5: break; case 6: temp0 = loud_f;break; case 7: temp0 = loud_g;break;} if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;www=1;} switch(menu_1){ case 0: bass_f = temp0;bass_f_func();break; case 1: bass_q = temp0;bass_q_func();break; case 2: mid_f = temp0;mid_f_func();break; case 3: mid_q = temp0;mid_q_func();break; case 4: treb_f = temp0;treb_f_func();break; case 5: break; case 6: loud_f = temp0;loud_f_func();break; case 7: loud_g = temp0;loud_g_func();break;} au(); for(i=0;i<8;i++){if(menu_1==i){lcd.setCursor(mesto[i],mesto1[i]);lcd.write((uint8_t)3);}else{lcd.setCursor(mesto[i],mesto1[i]);lcd.print(" ");}} lcd.setCursor(0,0);lcd.print("BASS");lcd.setCursor(5,0);lcd.print(bass_nam[bass_f]);lcd.setCursor(14,0);lcd.print("Q ");lcd.print(bass_nam_1[bass_q]); lcd.setCursor(0,1);lcd.print("MIDD");lcd.setCursor(5,1);lcd.print(mid_nam[mid_f]);lcd.setCursor(14,1);lcd.print("Q ");lcd.print(mid_nam_1[mid_q]); lcd.setCursor(0,2);lcd.print("TREB");lcd.setCursor(5,2);lcd.print(treb_nam[treb_f]);lcd.setCursor(14,2);lcd.print("Q N/A"); lcd.setCursor(0,3);lcd.print("LOUD");lcd.setCursor(5,3);lcd.print(lon_nam[loud_f]);lcd.setCursor(14,3);lcd.print("G ");lcd.print(loud_g/10);lcd.print(loud_g%10);lcd.setCursor(18,3);lcd.print("dB"); }// menu0 = 1 //////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// if(menu0==2){ switch(menu_2){ case 0: temp0 = lf;break; case 1: temp0 = rf;break; case 2: temp0 = lr;break; case 3: temp0 = rr;break; case 4: temp0 = sl;break; case 5: temp0 = sr;break; case 6: temp0 = faza;break; case 7: temp0 = sub_f;break;} if (newPosition != oldPosition){oldPosition = newPosition; temp0=temp0+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;www=1;} switch(menu_2){ case 0: lf = temp0;lf_func();break; case 1: rf = temp0;rf_func();break; case 2: lr = temp0;lr_func();break; case 3: rr = temp0;rr_func();break; case 4: sl = temp0;sl_func();break; case 5: sr = temp0;sr_func();break; case 6: faza = temp0;faza_func();break; case 7: sub_f = temp0;sub_f_func();break;} au(); for(i=0;i<8;i++){if(menu_2==i){lcd.setCursor(mesto2[i],mesto3[i]);lcd.write((uint8_t)3);}else{lcd.setCursor(mesto2[i],mesto3[i]);lcd.print(" ");}} lcd.setCursor(1,0);lcd.print("LF");lcd.setCursor(4,0);lcd.print(lf);lcd.print(" ");lcd.setCursor(7,0);lcd.print("dB ");lcd.setCursor(12,0);lcd.print("RF ");lcd.print(rf);lcd.print(" ");lcd.setCursor(18,0);lcd.print("dB"); lcd.setCursor(1,1);lcd.print("LR");lcd.setCursor(4,1);lcd.print(lr);lcd.print(" ");lcd.setCursor(7,1);lcd.print("dB ");lcd.setCursor(12,1);lcd.print("RR ");lcd.print(rr);lcd.print(" ");lcd.setCursor(18,1);lcd.print("dB"); lcd.setCursor(1,2);lcd.print("SL");lcd.setCursor(4,2);lcd.print(sl);lcd.print(" ");lcd.setCursor(7,2);lcd.print("dB ");lcd.setCursor(12,2);lcd.print("SR ");lcd.print(sr);lcd.print(" ");lcd.setCursor(18,2);lcd.print("dB"); lcd.setCursor(1,3);lcd.print("Faza ");if(faza==0){lcd.print(" 0");}else{lcd.print("180");}lcd.setCursor(12,3);lcd.print("Sf ");lcd.print(sub_nam[sub_f]); } // menu0 = 2 ////////////////////////// GAIN IN ///////////////////////////////////////////////////////////////////////////////////// if(in_x==1){ menu0=100; switch(in){ case 0: ch=0;break; case 1: ch=4;break; case 2: ch=1;break; } switch(ch){ case 0: gain0 = gain1;break; case 4: gain0 = gain2;break; case 1: gain0 = gain3;break;} if (newPosition != oldPosition) {oldPosition = newPosition; gain0=gain0+newPosition;myEnc.write(0);newPosition=0;time=millis();times_in=millis();www=1;w=1;w3=1;gain_func();} switch(ch){ case 0: gain1 = gain0;break; case 4: gain2 = gain0;break; case 1: gain3 = gain0;break;} au(); lcd.setCursor(2,1);lcd.print("Gain IN ");lcd.print(in+1);lcd.setCursor(12,1);lcd.print(" ");lcd.print(gain0);lcd.print(" ");lcd.setCursor(16,1);lcd.print("dB");gain_d=map(gain0, -31,23,0,20); if(w3==1){ for(z=0,z0=0,z1=0;z<=gain_d;z++,z1++){if(z1>2){z1=0;z0++;} if(z1==1){lcd.setCursor(z0+7,2);lcd.write((uint8_t)0);lcd.setCursor(z0+1+7,2);lcd.print(" ");}} if(z1==3){lcd.setCursor(z0+7,2);lcd.write((uint8_t)1);} if(z1==2){lcd.setCursor(z0+7,2);lcd.write((uint8_t)2);}} w3=0; if(millis()-times_in>3000){in_x=0;cl();menu0=0;w2_arr();}} ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// ///////////////////// EEPROM /////////////////////////////////////////////////////////////// if(millis()-time>10000 && w==1){ EEPROM.update(0,vol+59);EEPROM.update(1,treb+15);EEPROM.update(2,mid+15);EEPROM.update(3,bass+15); EEPROM.update(4,in);EEPROM.update(5,gain1);EEPROM.update(6,gain2);EEPROM.update(7,gain3); EEPROM.update(8,bass_f);EEPROM.update(9,bass_q);EEPROM.update(10,treb_f);EEPROM.update(11,sr), EEPROM.update(12,mid_f);EEPROM.update(13,mid_q);EEPROM.update(14,loud_f);EEPROM.update(15,loud_g); EEPROM.update(16,lf+79);EEPROM.update(17,rf+79);EEPROM.update(18,lr+79);EEPROM.update(19,rr+79);EEPROM.update(20,sl+79);EEPROM.update(21,sub_f); EEPROM.update(22,faza); menu=0;menu_1=0;menu_2=0;w=0;w2_arr();} }//loop void lf_func(){if(lf<0){lf=0;}if(lf>20){lf=20;}}; void rf_func(){if(rf<0){rf=0;}if(rf>20){rf=20;}}; void lr_func(){if(lr<0){lr=0;}if(lr>20){lr=20;}}; void rr_func(){if(rr<0){rr=0;}if(rr>20){rr=20;}}; void sl_func(){if(sl<0){sl=0;}if(sl>20){sl=20;}}; void sr_func(){if(sr<0){sr=0;}if(sr>20){sr=20;}}; void gain_func(){if(gain0<-31){gain0=-31;}if(gain0>23){gain0=23;}} void faza_func(){if(faza>1){faza=0;}if(faza<0){faza=1;}} void sub_f_func(){if(sub_f>3){sub_f=0;}if(sub_f<0){sub_f=3;}} void loud_g_func(){if(loud_g>15){loud_g=15;}if(loud_g<0){loud_g=0;}} void mid_q_func(){if(mid_q>2){mid_q=0;}if(mid_q<0){mid_q=3;}} void bass_q_func(){if(bass_q>3){bass_q=0;}if(bass_q<0){bass_q=3;}} void mid_f_func(){if(mid_f>3){mid_f=0;}if(mid_f<0){mid_f=3;}} void treb_f_func(){if(treb_f>3){treb_f=0;}if(treb_f<0){treb_f=3;}} void bass_f_func(){if(bass_f>3){bass_f=0;}if(bass_f<0){bass_f=3;}} void loud_f_func(){if(loud_f>3){loud_f=0;}if(loud_f<0){loud_f=3;}} void w2_arr(){w2[0]=1;w2[1]=1;w2[2]=1;w2[3]=1;} void au(){if(www==1){audio();www=0;}} void bass_func(){if(bass>15){bass=15;}if(bass<-15){bass=-15;}} void mid_func(){if(mid>15){mid=15;}if(mid<-15){mid=-15;}} void treb_func(){if(treb>15){treb=15;}if(treb<-15){treb=-15;}} void vol_func(){if(vol<-59){vol=-59;}if(vol>0){vol=0;}} void cl(){ir.value=0;delay(300);lcd.clear();} void cl1(){ir.value=0;delay(200);} void to_Timer(){newPosition = myEnc.read()/4;} void audio(){ tda.setMain(ch,0,0,0); // 0,0,0,0 // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 SE4 / 6 SE5 / 7 MUTE === TDA7718N // main_sel - 0 SE1 / 1 SE3 / 2 QD1 / 3 QD2_FD1 / 4 SE2 / 5 MUTE / 6 MUTE / 7 MUTE === TDA7718B // fd_qd - 0 FD / 1 QD2 // main_gain - 0 0dB / 1 3dB // sub_flat - 0 off / 1 on tda.setSoft_mute(mut,0,1,0,0,0,0);// 1,0,1,0,0,0,0 // soft_mute - 0 on / 1 off // pin_iic - 0 pin_and_iic / 1 iic // soft_mute_time - 0 0.48ms / 1 0.96ms / 2 7.68ms / 3 15.63ms // sub_in - 0 input_mux / 1 bass_output // sub_eneble - 0 on / 1 off // fast_ch - 0 on / 1 off // anty_filter - 0 on / off(bypass) tda.setSoft_step_1(0,0,0,0,0,0,0,0); // 0,0,0,0,0,0,0,0 // all - 0 on / 1 off tda.setSoft_step_2(0,0,0,0,1,1); // 0,0,0,0,1,1 // rr_soft - 0 on / 1 off // sub_l_soft - 0 on / 1 off // sub_r_soft - 0 on / 1 off // soft_time - 0 5ms / 1 10ms // zero - 0 100mV / 1 75mV / 2 50mV / 3 25mV // spike - 0 11mkS / 1 22mkS / 2 33mkS / 3 44mkS tda.setLoudness(loud_g,loud_f,0,0); // 0,0,0,0 // lon_att - byte 0...15 = 0...-15dB // lon_cen_f - 0 flat / 1 400Hz / 2 800Hz / 3 2400Hz // lon_h_boost - 0 on / 1 off // lon_soft_step - 0 act / 1 wait tda.setVolume_gain(gain0,1,0); // 0,0,0 // vol_gain - int -31...23 = -31...+23dB // vol_out_gain - 0 1dB / 1 0dB // vol_soft_step - 0 act / 1 wait tda.setTreble(treb,treb_f,0); // 0,0,0 // treb - int -15...+15 = -15...+15dB // treb_cen_f - 0 10.0kHz / 1 12.5kHz / 2 15.0kHz / 3 17.5 kHz // treb_soft_step - 0 act / 1 wait tda.setMiddle(mid,mid_q,0); // 0,0,0 // mid - int -15...+15 = -15...+15dB // mid_q - 0 0.75 / 1 1.0 / 2 1.25 / 3 reserved // mid_soft_step - 0 act / 1 wait tda.setBass(bass,bass_q,0); // 0,0,0 // bass - int -15...+15 = -15...+15dB // bass_q - 0 1.0 / 1 1.25 / 2 1.5 / 3 2.0 // bass_soft_step - 0 act / 1 wait tda.setSub_Mid_Bass(sub_f,faza,mid_f,bass_f,0); // 0,0,0,0,0 // sub_cen_f - 0 55Hz / 1 85Hz / 2 120Hz / 3 160Hz // sub_faza - 0 180deg / 1 0deg // mid_cen_f - 0 500Hz / 1 1000Hz / 2 1500Hz / 3 2500Hz // bass_cen_f - 0 60Hz / 1 80Hz / 2 100Hz / 3 200Hz // bass_dc - 0 on / 1 off tda.setLF(vol-20+lf,0); tda.setRF(vol-20+rf,0); tda.setLR(vol-20+lr,0); tda.setRR(vol-20+rr,0); tda.setSL(vol-20+sl,0); tda.setSR(vol-20+sr,0); // all int -79...+15 = -79...+15dB // all - 0 act / 1 wait }
Форум — http://forum.rcl-radio.ru/viewtopic.php?pid=1858#p1858

hello sir, can you share arduino code for this project using lcd 16×2 like on project TDA7719
thanks..
http://rcl-radio.ru/?p=62993
can the code for tda7719 be used for tda7718
no
i need code for tda7718 + lcd 16×2 without i2c connection like on project tda7719. can you help?
У меня нет возможно протестировать скетч.
you can send code to my email : eltronics.et@gmail
i’ll test the code
«TDA7718 + BEKLEME + DS3231«`bu projenin bağlantı şemasını paylaşabilir misiniz, bu projeyi TDA7719 da kullanmak istiyorum
Не могли бы вы поделиться схемой подключения последнего проекта с ждущим режимом?