GPS (Global Positioning System) — это глобальная спутниковая система навигации, разработанная и поддерживаемая правительством США. Она позволяет определять координаты и время в любой точке Земли с помощью спутников, которые находятся на орбите вокруг Земли.
GPS состоит из сети спутников, которые передают сигналы, и приемников, которые принимают эти сигналы и обрабатывают их, чтобы определить свое местоположение. Каждый спутник GPS посылает информацию о своем местоположении и времени синхронизации с наземными станциями, которые обрабатывают эти данные и передают их пользователям.
GPS широко используется в навигации, геодезии, геоинформационных системах, мониторинге транспорта и других областях. Он позволяет точно определять местоположение и перемещение объектов на Земле, что делает его важным инструментом для различных приложений.
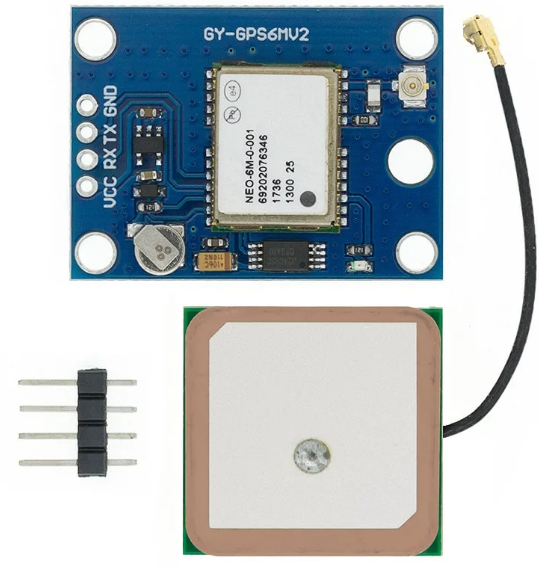
Модуль GY-NEO6MV2 — это компактное устройство, которое используется для определения координат и времени с помощью спутниковой системы GPS. Модуль NEO-6M GPS включает в себя высокочувствительный приемник GPS-сигналов, а также микроконтроллер для обработки полученных данных.
Основными характеристиками модуля GY-NEO6MV2 являются:
— Высокая точность определения координат и времени
— Широкий диапазон рабочих температур (-40…+85°C)
— Поддержка нескольких систем спутниковой навигации (GPS, GLONASS, Galileo, BeiDou)
— Низкое энергопотребление (в режиме ожидания — менее 20 мА)
— Интерфейс UART для передачи данных
Для работы с модулем GY-NEO6MV2 необходимо подключить его к микроконтроллеру или компьютеру через интерфейс UART и настроить его на прием данных от спутников. Модуль можно использовать в различных проектах, связанных с навигацией, геолокацией и мониторингом объектов.
Модуль NGY-NEO6MV2 способен отслеживать до 22 спутников на 50 каналах с большим уровнем чувствительности -161 дБ. Рабочее напряжение модуля 3,3 В (или 5 В при наличии стабилизатора на плате модуля). В модуле установлена микросхема HK24C32 (EEPROM) с объемом памяти 4 КБ, в EEPROM хранятся данные часов, последние данные о местоположении (данные об орбите) и конфигурацию модуля. Батарейка автоматически заряжается при включении модуля и сохраняет данные до двух недель. В модуле установлен светодиод который сигнализирует о состоянии определения местоположения, если светодиод горит но не мигает, значит идет поиск спутников, если светодиод мигает, значит спутники найдены и идет определение местоположения.
Так как модуль GY-NEO6MV2 позволяет принимать время UTC, то его можно использовать для установки коррекции времени в часах.
UTC (Coordinated Universal Time) — это мировое координированное время, которое используется в качестве стандарта для согласования времени в разных частях мира. Оно основано на атомных часах и корректируется для согласования со сменой года и сезонов. UTC имеет постоянную длительность суток, которая составляет 24 часа.
UTC используется во всем мире в качестве стандарта времени для многих приложений, таких как навигация, телекоммуникации, астрономия и т.д. Он является основой для определения временных зон и синхронизации времени в компьютерных сетях и других системах.
UTC отличается от GMT (Greenwich Mean Time) тем, что он не зависит от времени в Гринвиче и использует атомные часы вместо звездного времени.
Время UTC не имеет временного сдвига относительно времени в Гринвиче (GMT), так как оно является мировым стандартом времени, который используется во всем мире. Однако, время UTC может отличаться от местного времени в зависимости от того, в какой части мира находится конкретное местоположение.
Для согласования времени в разных частях мира используются различные временные зоны, которые отличаются от UTC на определенное количество часов. Например, время в Нью-Йорке отличается от UTC на 5 часов в зимнее время и на 4 часа в летнее время из-за перехода на летнее время.
Поэтому, чтобы узнать время UTC в определенный момент времени, необходимо знать разницу между местным временем и временной зоной, в которой находится это местоположение.
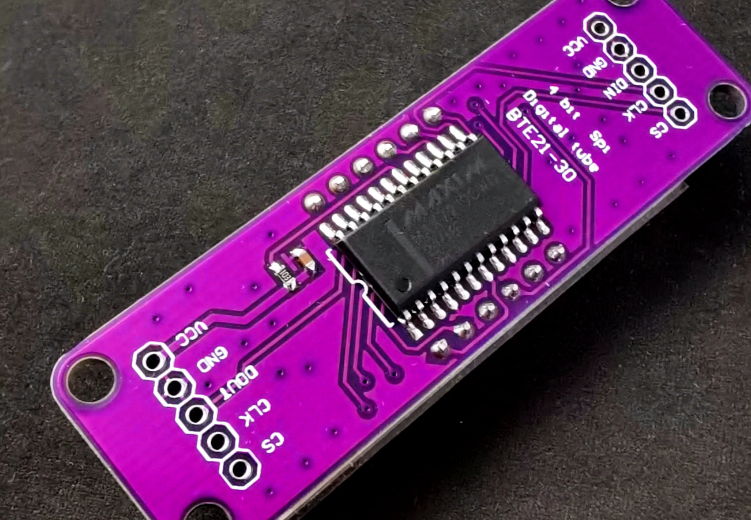
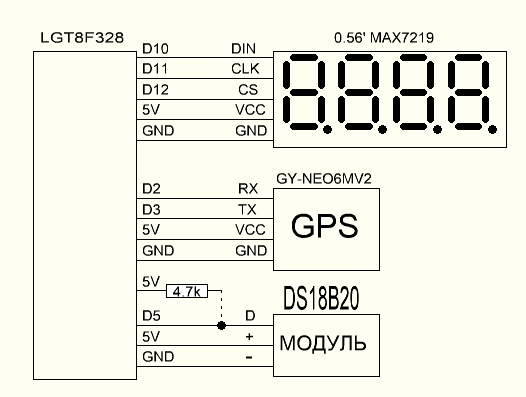
Используя модуль NGY-NEO6MV2 можно сделать простые часы. В часах можно использовать различные семисегментные индикаторы с общим анодом, в данном проекте использованы индикаторы CPS05641 0.56′ на базе драйвера MAX7219.
 |
 |
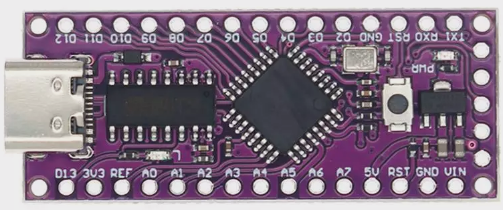
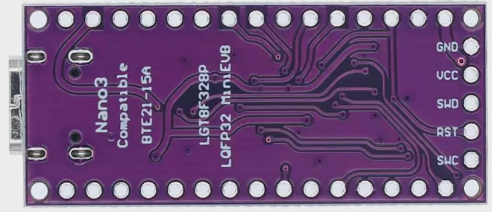
В качестве микроконтроллера используется плата разработчика LGT8F328P-LQFP32 MiniEVB, которая основана на китайском микроконтроллер LGT8F328p и является клоном популярной AVR ATmega328p (Arduino NANO). Микроконтроллер LGT8F328p практически полностью совместим с микроконтроллером ATmega328p и обладает рядом дополнительных функций и возможностей превышающих ATmega328p.
 |
 |
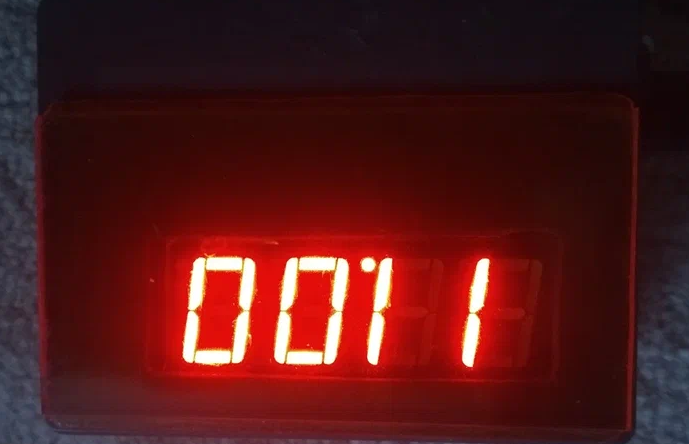
Дополнительно в часах используется цифровой датчик температуры DS18B20, показания температуры выводится на индикатор каждые 1,5 минуты в течении 5 секунд.
Схема часов
Для правильной работы часов плата LGT8F328P-LQFP32 MiniEVB в Arduino IDE должна иметь следующие параметры: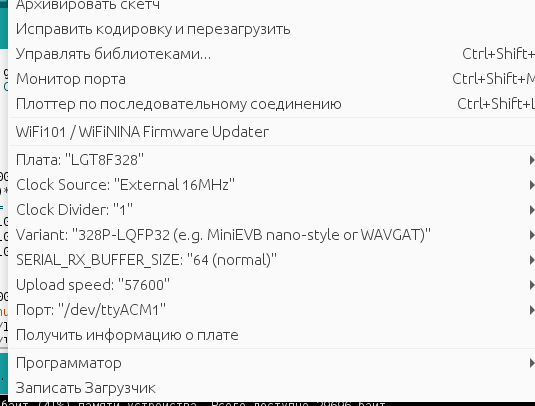
Скетч:
#define DIN 10 #define CLK 11 #define CS 12 #define RX 2 #define TX 3 #define time_offset 21600 // смещение от UTC 1 час = 3600 #define KORR_T -4.0 // DS18B20 коррекция температуры #include <TinyGPS++.h> // https://github.com/mikalhart/TinyGPSPlus/archive/refs/heads/master.zip #include <TimeLib.h> // https://github.com/PaulStoffregen/Time/archive/master.zip #include <SoftwareSerial.h> #include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip TinyGPSPlus gps; SoftwareSerial SoftSerial(TX,RX); OneWire ds(5); // Вход датчика 18b20 unsigned long times; byte last_minute, Second, Minute, Hour, Day, Month; int Year; int timer,temp; bool w=1; int min_old; int hh,mm,ss; void setup(){ Serial.begin(9600); SoftSerial.begin(9600); pinMode(DIN,OUTPUT); pinMode(CLK,OUTPUT); pinMode(CS,OUTPUT); delay(2); digitalWrite(CS,HIGH);digitalWrite(CLK,LOW);digitalWrite(DIN,LOW); WriteBit16(0x0F, 0);// тест выкл. WriteBit16(0x0C, 1);// вкл. индик. WriteBit16(0x0A, 2);// яркость WriteBit16(0x09, 0xFF);// дешифраторы вкл. WriteBit16(0x0B, 3);// кол-во разрядов Serial.println("LED_OK"); } void loop(){ while (SoftSerial.available() > 0){ if (gps.encode(SoftSerial.read())){ if (gps.time.isValid()){ Minute = gps.time.minute(); Second = gps.time.second(); Hour = gps.time.hour(); Serial.println("UTC"); Serial.print(Hour);Serial.print(":"); Serial.print(Minute);Serial.print(":"); Serial.println(Second); } if (gps.date.isValid()){ Day = gps.date.day(); Month = gps.date.month(); Year = gps.date.year(); Serial.print(Day);Serial.print("-"); Serial.print(Month);Serial.print("-"); Serial.println(Year); }}} if(last_minute != gps.time.minute()){ w=1; last_minute = gps.time.minute(); setTime(Hour, Minute, Second, Day, Month, Year); adjustTime(time_offset); Serial.println("UTC+"); Serial.print(hour());Serial.print(":"); Serial.print(minute());Serial.print(":"); Serial.println(second()); Serial.print(day());Serial.print("-"); Serial.print(month());Serial.print("-"); Serial.println(year()); Serial.println(week_day()); } if (millis() > 5000 && gps.charsProcessed() < 10){ Serial.println("No GPS detected"); while(true);} if(Year>=2023){ if(millis()-times>=75000){ temp = int(dsRead(0)*100);delay(200); Serial.print("TEMP = ");Serial.println(float(temp)/100.0,1); WriteBit16(1, temp/1000%10); WriteBit16(2, temp/100%10 + 0xF0); WriteBit16(3, temp/10%10); WriteBit16(4, 0x0F); } if(millis()-times<75000){ timer=hour()*100+minute(); WriteBit16(1, timer/1000%10); WriteBit16(2, timer/100%10 + 0xF0); WriteBit16(3, timer/10%10); WriteBit16(4, timer%10); Serial.println("TIMER"); Serial.print(hour()/10%10);Serial.print(hour()%10);Serial.print(":"); Serial.print(minute()/10%10);Serial.print(minute()%10);Serial.print(":"); Serial.print(second()/10%10);Serial.println(second()%10); delay(500); WriteBit16(1, timer/1000%10); WriteBit16(2, timer/100%10); WriteBit16(3, timer/10%10); WriteBit16(4, timer%10); delay(500); } if(millis()-times>80000){times=millis();} } else{ WriteBit16(1, 10); WriteBit16(2, 10+0xF0); WriteBit16(3, 10); WriteBit16(4, 10); delay(500); WriteBit16(1, 10); WriteBit16(2, 10); WriteBit16(3, 10); WriteBit16(4, 10); delay(500); } } // end loop byte week_day(){ byte a = f_div((14 - month()), 12); unsigned int y = year() - a; byte m = month() + 12 * a - 2; unsigned int y4 = f_div(y, 4); byte y100 = f_div(y, 100); byte y400 = f_div(y, 400); byte x = f_div(31 * m, 12); byte wd = (day() + y + y4 - y100 + y400 + x) % 7; return wd; } unsigned int f_div(unsigned int x, unsigned int y){ unsigned int result; result = (x - (x % y)) / y; return result; } void WriteBit16(byte reg, byte data){ digitalWrite(CLK,LOW); digitalWrite(CS,LOW); for(int i = 7; i >= 0; i--){ if(((reg >> i) & 1) == 1){digitalWrite(DIN,HIGH);}else{digitalWrite(DIN,LOW);} digitalWrite(CLK,HIGH);digitalWrite(CLK,LOW); } for(int i = 7; i >= 0; i--){ if(((data >> i) & 1) == 1){digitalWrite(DIN,HIGH);}else{digitalWrite(DIN,LOW);} digitalWrite(CLK,HIGH);digitalWrite(CLK,LOW); } digitalWrite(CS,HIGH);digitalWrite(CLK,LOW);digitalWrite(DIN,LOW); } float dsRead(byte x) { byte data[2], addr[8][8], kol = 0; while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков kol++; } ds.reset_search(); // Сброс поиска датчика ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0x44, 0); // Измерение температуры с переносом данных в память ds.reset(); // Инициализация, выполняется сброс шины ds.select(addr[x]); // Обращение к датчику по адресу ds.write(0xBE); // Обращение памяти for (byte i=0; i<9; i++) data[i]=ds.read(); int raw=(data[1]<<8)|data[0]; float value = (float)raw *0.0625 + KORR_T; return value; // Расчет температуры и вывод }
Скетч часов нуждается в корректировке трех параметров:
- #define time_offset 21600 // смещение от UTC 1 час = 3600
- #define KORR_T -4.0 // DS18B20 коррекция температуры
- WriteBit16(0x0A, 2); // яркость от 0 до 15
Первый параметр это сдвиг в секундах от времени UTC, второй параметр это корректировка показаний температуры датчика, третий яркость индикаторов.
Рекомендуется устанавливать датчик температуры DS18B20 вне корпуса часов, при установке в корпусе возможен дополнительный нагрев датчика от других элементов схемы.
После включения часов модуль GY-NEO6MV2 начнет искать спутники, на это может потребоваться определенное время, при этом на дисплей будет выводится надпись — -.- — .


Вывод температуры
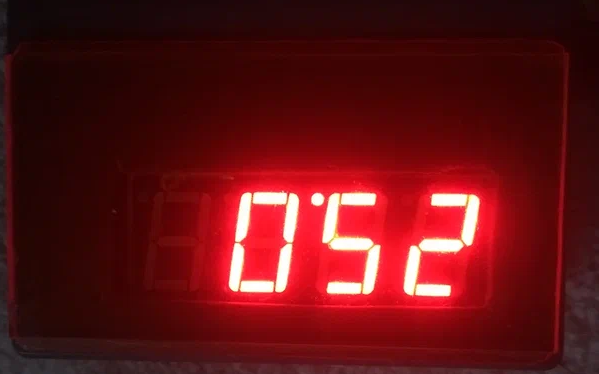
Время
Форум — http://forum.rcl-radio.ru/viewtopic.php?pid=8928#p8928

 4,50 (2)
4,50 (2)