Аналого-цифровой преобразователь (ADC) микроконтроллера ATtiny45 содержит 4 однополярных канала и 2 дифференциальных канала с усилением на 1 и 20. Все каналы имеют разрешение 10 бит. Так же имеется внутренний ИОН который имеет три опорных напряжения: напряжение питания микроконтроллера, 2.56 В и 1.1 В.

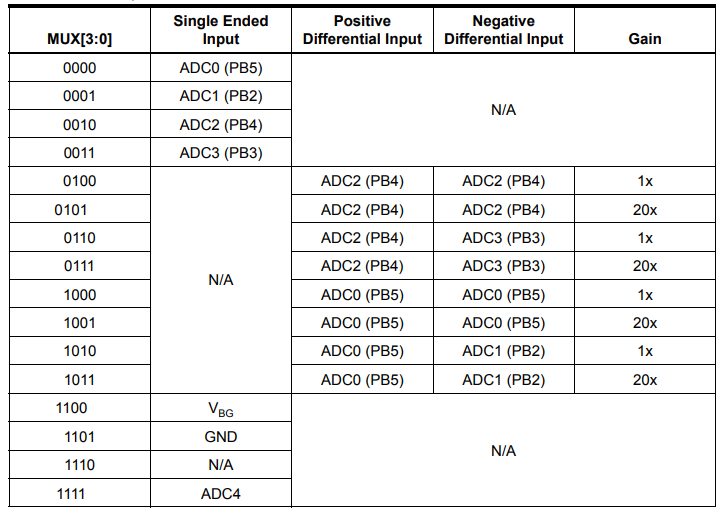
Выбор однополярного или дифференциального входа осуществляется при помощи регистра ADMUX путем записи битов MUX3…MUX0. Так же при помощи этого регистра можно выбрать источник опорного напряжения (биты REFS2 REFS1 REFS0).
![]()
Выбор входа
Выбор источника опорного напряжения
| REFS2 | REFS1 | REFS0 | Источник опорного напряжения |
| X | 0 | 0 | Vcc — источник питания микроконтроллера |
| X | 0 | 1 | Внешний источник опорного напряжения, для подачи опорного напряжения используется вход PB0 |
| 0 | 1 | 1 | Внутренний источник опорного напряжения 1,1 В |
| 0 | 1 | 1 | N/A |
| 1 | 1 | 0 | Внутренний источник опорного напряжения 2.56 В |
| 1 | 1 | 1 | Внутренний источник опорного напряжения 2.56 В с использованием фильтрующего конденсатора подключенного к PB0 |
Регистр управления ADCSRA определяет режим работы АЦП, определяет режим работы предделителя тактовой частоты.
![]()
- ADEN — включает АЦП
- ADSC — запуск преобразования
- ADATE — позволяет запускать преобразование по прерыванию от периферийных устройств микроконтроллера
- ADIF — флаг прерывания от АЦП
- ADPS2 — ADPS0 — выбирают режим работы предделителя тактовой частоты:
- 0 0 0 — CLK/2
- 0 0 1 — CLK/2
- 0 1 0 — CLK/4
- 0 1 1 — CLK/8
- 1 0 0 — CLK/16
- 1 0 1 — CLK/32
- 1 1 0 — CLK/64
- 1 1 1 — CLK/128
Результаты преобразования АЦП записываются в два регистра ADCL и ADCH, так как АЦП микроконтроллера 10 бит, то младшие биты записываются в регистр ADCL, а 2 старших в регистр ADCH.
При опросе регистров ADCL и ADCH, обязательным условием служит то что, первым считываться должен регистр ADCL, а потом только ADCH. Так же стоит обратить внимание на бит ADLAR в регистре ADMUX, который меняет расположения чтения битов регистров ADCL и ADCH.
ADLAR = 0

ADLAR = 1

Ниже показано несколько пример использования АЦП микроконтроллера ATtiny45.
Перед прошивкой микроконтроллера рекомендую ознакомится со статьей — http://rcl-radio.ru/?p=129389 (общие сведения о микроконтроллере ATtiny45, прошивка при помощи Arduino IDE).
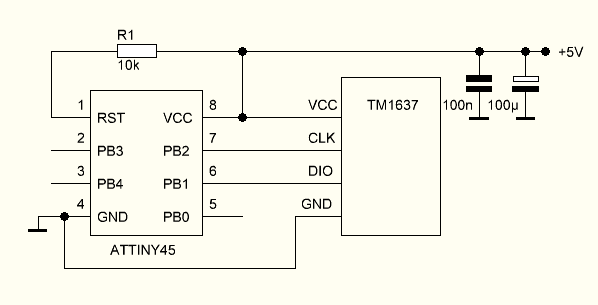
Для вывода результатов измерения в примерах будет использован модуль TM1637, который представляет собой 4-х разрядный семисегментный дисплей на базе драйвера TM1637.
Одиночный вход, внутреннее опорное — напряжение питания микроконтроллера
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 // PB4 INPUT void setup(){ cli(); ADMUX |= (1 << MUX1); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); sei(); } void loop(){ long u=0; for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); int u_data = (ADCL|ADCH << 8); u += u_data;delay(100); } u=u/10; tm_print(500*u/1023,1,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, bool pd_t, byte br){ tm_start();tm_dec(0b10001000 + br); tm_dec(0x40);tm_stop();tm_start(); int data0 =10; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } if(pd_t==1){data1 = data1+0b10000000;} tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}
На вход PB4 подается напряжение от 0 до 5В, для повышения стабильности измерений АЦП производит 10 измерений через каждые 100 мс, а далее на индикатор выводится среднее значение десяти измерений.




Одиночный вход, внутреннее опорное — 2,56 В
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 // PB4 INPUT void setup(){ cli(); ADMUX |= (1 << MUX1)|(1 << REFS2)|(1 << REFS1); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); sei(); } void loop(){ long u=0; for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); int u_data = (ADCL|ADCH << 8); u += u_data;delay(100); } u=u/10; tm_print(256*u/1023,1,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, bool pd_t, byte br){ tm_start();tm_dec(0b10001000 + br); tm_dec(0x40);tm_stop();tm_start(); int data0 =10; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } if(pd_t==1){data1 = data1+0b10000000;} tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}
Одиночный вход, внутреннее опорное — 1,10 В
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 // PB4 INPUT void setup(){ cli(); ADMUX |= (1 << MUX1)|(1 << REFS1); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); sei(); } void loop(){ long u=0; for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); int u_data = (ADCL|ADCH << 8); u += u_data;delay(100); } u=u/10; tm_print(1100*u/1023,3,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, byte pd_t, int br){ tm_start();tm_dec(0b10001000 + br);//tm_stop();tm_start(); tm_dec(0x40);tm_stop();tm_start(); int data0 = t / 1000 % 10; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто case 11: data = 0b01000000;break; // - } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } switch(pd_t){ case 1 : data2 = data2+0b10000000;break; case 2 : data1 = data1+0b10000000;break; case 3 : data0 = data0+0b10000000;break; } tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}
Внутренний термометр
Помимо измерения напряжения АЦП так же может измерять температуру кристалла микроконтроллера, В при запросе ко внутреннему термометру АЦП выдает числовое значение температуры согласно этой таблице:

Вычислить температуру можно используя следующую формулу:
![]()
где k — фиксированный коэффициент наклона, а TOS — смещение датчика температуры. Обычно значение k очень близко к 1,0, и при одноточечной калибровке коэффициент может быть опущен. Там, где требуется более высокая точность, коэффициент наклона следует оценивать на основе измерений двух температур.
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 void setup(){ cli(); ADMUX |= (1 << MUX3)|(1 << MUX2)|(1 << MUX1)|(1 << MUX0)|(1 << REFS1); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); sei(); } void loop(){ long u=0; for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); int u_data = (ADCL|ADCH << 8); u += u_data;delay(100); } u=u/10; tm_print(u-25,1,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, byte pd_t, int br){ tm_start();tm_dec(0b10001000 + br);//tm_stop();tm_start(); tm_dec(0x40);tm_stop();tm_start(); int data0 = 10; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто case 11: data = 0b01000000;break; // - } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } switch(pd_t){ case 1 : data2 = data2+0b10000000;break; case 2 : data1 = data1+0b10000000;break; case 3 : data0 = data0+0b10000000;break; } tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}

Дифференциальный вход, внутреннее опорное — 1,10 В, коэффициент усиления 1
При использовании дифференциального входа (в примере использованы входы PB3 и PB4), напряжение любой полярности подается на дифференциальные входы, при этом старший бит результата измерения регистра ADCH используется для определения полярности напряжения поданного на дифференциальные входы напряжения, а сам результат измерения становится 9 бит.
Ниже показан пример использования дифференциального входа АЦП, на входы подается напряжение 0,6 В.
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 // INPUT PB3 PB4 void setup(){ cli(); ADMUX |= (1 << MUX2)|(1 << MUX1)|(1 << REFS1); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); ADCSRB |= (1 << 7); sei(); } void loop(){ long u=0; unsigned int u_data,pol; int k0 = 35;// калибровка нуля for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); u_data = (ADCL|ADCH << 8); u += u_data; delay(100); } u=u/10+k0; if((u>>9)==1){pol=11;u = 1023-u;} else{pol=10;} tm_print(110*u/512,2,pol,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, byte pd_t,int polar, int br){ tm_start();tm_dec(0b10001000 + br);//tm_stop();tm_start(); tm_dec(0x40);tm_stop();tm_start(); int data0 = polar; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто case 11: data = 0b01000000;break; // - } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } switch(pd_t){ case 1 : data2 = data2+0b10000000;break; case 2 : data1 = data1+0b10000000;break; case 3 : data0 = data0+0b10000000;break; } tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}


Измерение внутреннего опорного напряжения АЦП
При проведении измерений для повышения точности измерений можно периодически измерять внутренне опорное напряжение и вводить корректировку в результаты измерений при изменении внутреннего опорного напряжения (например из-за изменения температуры окружающей среды).
#define CLK PB2 // TM1637 #define DIO PB1 // TM1637 // PB4 INPUT void setup(){ cli(); ADMUX |= (1 << MUX3)|(1 << MUX2)|(1 << REFS1)|(1 << REFS2); ADCSRA |= (1<<ADEN)|(1 << ADATE)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); sei(); } void loop(){ long u=0; for(int n=0;n<10;n++){ while((ADCSRA & (1 << ADIF)) == 0); int u_data = (ADCL|ADCH << 8); u += u_data;delay(100); } u=u/10; tm_print(2560*u/1023,3,5); } void tm_dec(byte dig){ for(byte i = 0; i < 8; i++) { DDRB |= (1 << CLK);del(); if (dig & 0x01) DDRB &= ~(1 << DIO); else DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); dig = dig >> 1; } DDRB |= (1 << CLK); DDRB &= ~(1 << DIO);del(); DDRB &= ~(1 << CLK);del(); if (((PINB >> DIO) & 1) == 0) DDRB |= (1 << DIO);del(); DDRB |= (1 << CLK);del(); } void tm_stop(){ DDRB |= (1 << DIO);del(); DDRB &= ~(1 << CLK);del(); DDRB &= ~(1 << DIO);del(); } void tm_start(){ DDRB |= (1 << DIO);del(); } void tm_print(int t, byte pd_t, int br){ tm_start();tm_dec(0b10001000 + br);//tm_stop();tm_start(); tm_dec(0x40);tm_stop();tm_start(); int data0 = t/1000; int data1 = t / 100 % 10; int data2 = t / 10 % 10; int data3 = t % 10; for(byte n = 0; n < 4; n++){ int data; switch(n){ case 0: data = data0;break; case 1: data = data1;break; case 2: data = data2;break; case 3: data = data3;break; } switch(data){ // XGFEDCBA case 0: data = 0b00111111;break; // 0 case 1: data = 0b00000110;break; // 1 case 2: data = 0b01011011;break; // 2 case 3: data = 0b01001111;break; // 3 case 4: data = 0b01100110;break; // 4 case 5: data = 0b01101101;break; // 5 case 6: data = 0b01111101;break; // 6 case 7: data = 0b00000111;break; // 7 case 8: data = 0b01111111;break; // 8 case 9: data = 0b01101111;break; // 9 case 10: data = 0b00000000;break; // пусто case 11: data = 0b01000000;break; // - } if(n == 0){data0 = data;} if(n == 1){data1 = data;} if(n == 2){data2 = data;} if(n == 3){data3 = data;} } switch(pd_t){ case 1 : data2 = data2+0b10000000;break; case 2 : data1 = data1+0b10000000;break; case 3 : data0 = data0+0b10000000;break; } tm_dec(0xC0);tm_dec(data0);tm_dec(data1);tm_dec(data2);tm_dec(data3);tm_stop(); } void del(){delay(1);}

