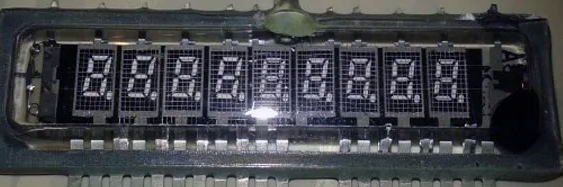
ИВ-28А — индикатор цифровой 9-и разряджный вакуумный люминесцентный предназначен для отображения информации в виде цифр от 0 до 9.
Основные параметры индикатора ИВ-28А:
- Яркость свечения одного разряда ≥150 кд/м²
- Угол обзора ≥80°
- Ток накала 35+5 мА
- Ток анодов-сегментов одного цифрового разряда суммарный в импульсном режиме 1,5-2,5 мА
- Ток сетки одного разряда в импульсном режиме 2-3 мА
- Напряжение накала — 2,4±0,25 В
- Напряжения анодов и сетки в импульсном режиме 27-50 В
На базе индикатора ИВ-28А можно собрать простые часы, которые будут отображать часы, минуты, секунды и десятые доли секунд. Для установки текущего времени используются три кнопки. При нажатии кнопки SET начинают мигать индикаторы часов, кнопками UP и DW можно изменить показания часов, при повторном нажатии кнопки SET можно изменить время минут, если нажать кнопку третий раз можно сбросить показания секунд.


Часы собраны на микроконтроллере Atmega8 с частотой кварцевого резонатора 12 МГц. Таймер 1 используется для получения точного интервала времени 0,1 с, таймер 2 управляет динамической индикацией.
// ATMEGA8 12MHz #define G8_B PB1 #define G7_B PB3 #define G6_B PB5 #define G5_C PC1 #define G4_B PB0 #define G3_D PD7 #define G2_D PD5 #define G1_D PD3 #define G0_D PD1 #define A_D PD0 #define B_D PD2 #define C_D PD4 #define D_C PC2 #define E_C PC0 #define F_B PB2 #define G_B PB4 #define DP_D PD6 #define SET PC3 #define UP PC4 #define DW PC5 #include <avr/io.h> #include <util/delay.h> byte a[9],an,segm,i; int set,msec,sec,min=20,hour=10; int main() { cli(); // (12000000/((18749+1)x64))=10 Hz OCR1A = 18749; TCCR1B |= (1 << WGM12); // Prescaler 64 TCCR1B |= (1 << CS11) | (1 << CS10); TIMSK |= (1 << OCIE1A); // (12000000/((186+1)x128))=501.33689839572 Hz OCR2 = 186; TCCR2 |= (1 << WGM21); // Prescaler 128 TCCR2 |= (1 << CS22) | (1 << CS20); TIMSK |= (1 << OCIE2); sei(); DDRB|=(1<<G8_B)|(1<<F_B)|(1<<G7_B)|(1<<G_B)|(1<<G6_B)|(1<<G4_B); DDRC|=(1<<E_C)|(1<<G5_C)|(1<<D_C); DDRD|=(1<<G3_D)|(1<<DP_D)|(1<<G2_D)|(1<<C_D)|(1<<G1_D)|(1<<B_D)|(1<<G0_D)|(1<<A_D); DDRC&=~(1<<PC3)|(1<<PC4)|(1<<PC5); PORTC|=(1<<PC3)|(1<<PC4)|(1<<PC5); while(1) { if(((PINC >> SET) & 1) == 0){set++;if(set>3){set=0;}_delay_ms(300);} if(((PINC >> UP) & 1) == 0 && set==1){hour++;if(hour>23){hour=23;}_delay_ms(300);} if(((PINC >> DW) & 1) == 0 && set==1){hour--;if(hour<0){hour=0;}_delay_ms(300);} if(((PINC >> UP) & 1) == 0 && set==2){min++;if(min>59){min=59;}_delay_ms(300);} if(((PINC >> DW) & 1) == 0 && set==2){min--;if(min<0){min=0;}_delay_ms(300);} if(((PINC >> UP) & 1) == 0 && set==3){sec=0;msec=0;_delay_ms(300);} if(((PINC >> DW) & 1) == 0 && set==3){sec=0;msec=0;_delay_ms(300);} if(set==1&&(msec==0||msec==5)){a[8]=10;}else{a[8]=hour/10;} if(set==1&&(msec==0||msec==5)){a[7]=10;}else{a[7]=hour%10;} a[6]=11; if(set==2&&(msec==0||msec==5)){a[5]=10;}else{a[5]=min/10;} if(set==2&&(msec==0||msec==5)){a[4]=10;}else{a[4]=min%10;} a[3]=11; if(set==3&&(msec==0||msec==5)){a[2]=10;}else{a[2]=sec/10;} if(set==3&&(msec==0||msec==5)){a[1]=10;}else{a[1]=sec%10;} a[0]=msec; _delay_ms(10); }} ISR(TIMER2_COMP_vect){ switch(i){ case 0: segm=a[0]; an=16; anod(); _delay_us(1); if(a[0]==10)an=16;else an=0; anod();segment(); break; case 1: segm=a[1]; an=16; anod(); _delay_us(1); if(a[1]==10)an=16;else an=1; anod();segment(); break; case 2: segm=a[2]; an=16; anod(); _delay_us(1); if(a[2]==10)an=16;else an=2; anod();segment(); break; case 3: segm=a[3]; an=16; anod(); _delay_us(1); if(a[3]==10)an=16;else an=3; anod();segment(); break; case 4: segm=a[4]; an=16; anod(); _delay_us(1); if(a[4]==10)an=16;else an=4; anod();segment(); break; case 5: segm=a[5]; an=16; anod(); _delay_us(1); if(a[5]==10)an=16;else an=5; anod();segment(); break; case 6: segm=a[6]; an=16; anod(); _delay_us(1); if(a[6]==10)an=16;else an=6; anod();segment(); break; case 7: segm=a[7]; an=16; anod(); _delay_us(1); if(a[7]==10)an=16;else an=7; anod();segment(); break; case 8: segm=a[8]; an=16; anod(); _delay_us(1); if(a[8]==10)an=16;else an=8; anod();segment(); break; }i++;if(i>8){i=0;} } void segment(){ switch(segm){ case 0: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC &=~(1<<E_C);PORTB &=~(1<<F_B);PORTB |=(1<<G_B);PORTD |=(1<<DP_D);break; case 1: PORTD |=(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC |=(1<<D_C);PORTC |=(1<<E_C);PORTB |=(1<<F_B);PORTB |=(1<<G_B);PORTD |=(1<<DP_D);break; case 2: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD |=(1<<C_D);PORTC &=~(1<<D_C);PORTC &=~(1<<E_C);PORTB |=(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 3: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC |=(1<<E_C);PORTB |=(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 4: PORTD |=(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC |=(1<<D_C);PORTC |=(1<<E_C);PORTB &=~(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 5: PORTD &=~(1<<A_D);PORTD |=(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC |=(1<<E_C);PORTB &=~(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 6: PORTD &=~(1<<A_D);PORTD |=(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC &=~(1<<E_C);PORTB &=~(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 7: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC |=(1<<D_C);PORTC |=(1<<E_C);PORTB |=(1<<F_B);PORTB |=(1<<G_B);PORTD |=(1<<DP_D);break; case 8: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC &=~(1<<E_C);PORTB &=~(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 9: PORTD &=~(1<<A_D);PORTD &=~(1<<B_D);PORTD &=~(1<<C_D);PORTC &=~(1<<D_C);PORTC |=(1<<E_C);PORTB &=~(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break; case 11: PORTD |=(1<<A_D);PORTD |=(1<<B_D);PORTD |=(1<<C_D);PORTC |=(1<<D_C);PORTC |=(1<<E_C);PORTB |=(1<<F_B);PORTB &=~(1<<G_B);PORTD |=(1<<DP_D);break;//- } if(an==1){PORTD &=~(1<<DP_D);} } void anod(){ switch(an){ case 0: PORTB |=(1<<G8_B);PORTD &=~(1<<G0_D);break; case 1: PORTD |=(1<<G0_D);PORTD &=~(1<<G1_D);break; case 2: PORTD |=(1<<G1_D);PORTD &=~(1<<G2_D);break; case 3: PORTD |=(1<<G2_D);PORTD &=~(1<<G3_D);break; case 4: PORTD |=(1<<G3_D);PORTB &=~(1<<G4_B);break; case 5: PORTB |=(1<<G4_B);PORTC &=~(1<<G5_C);break; case 6: PORTC |=(1<<G5_C);PORTB &=~(1<<G6_B);break; case 7: PORTB |=(1<<G6_B);PORTB &=~(1<<G7_B);break; case 8: PORTB |=(1<<G7_B);PORTB &=~(1<<G8_B);break; case 16: PORTD |=(1<<G0_D);PORTD |=(1<<G1_D);PORTD |=(1<<G2_D);PORTD |=(1<<G3_D);PORTB |=(1<<G4_B);PORTC |=(1<<G5_C);PORTB |=(1<<G6_B);PORTB |=(1<<G7_B);PORTB |=(1<<G8_B);break; }} ISR(TIMER1_COMPA_vect){ msec++; if(msec>9){msec=0;sec++;} if(sec>59){sec=0;min++;} if(min>59){min=0;hour++;} if(hour>23){hour=0;} }
Форум — http://forum.rcl-radio.ru/viewtopic.php?pid=5438#p5438

 4,20 (5)
4,20 (5)